RRF 펌웨어 플래싱 및 설정
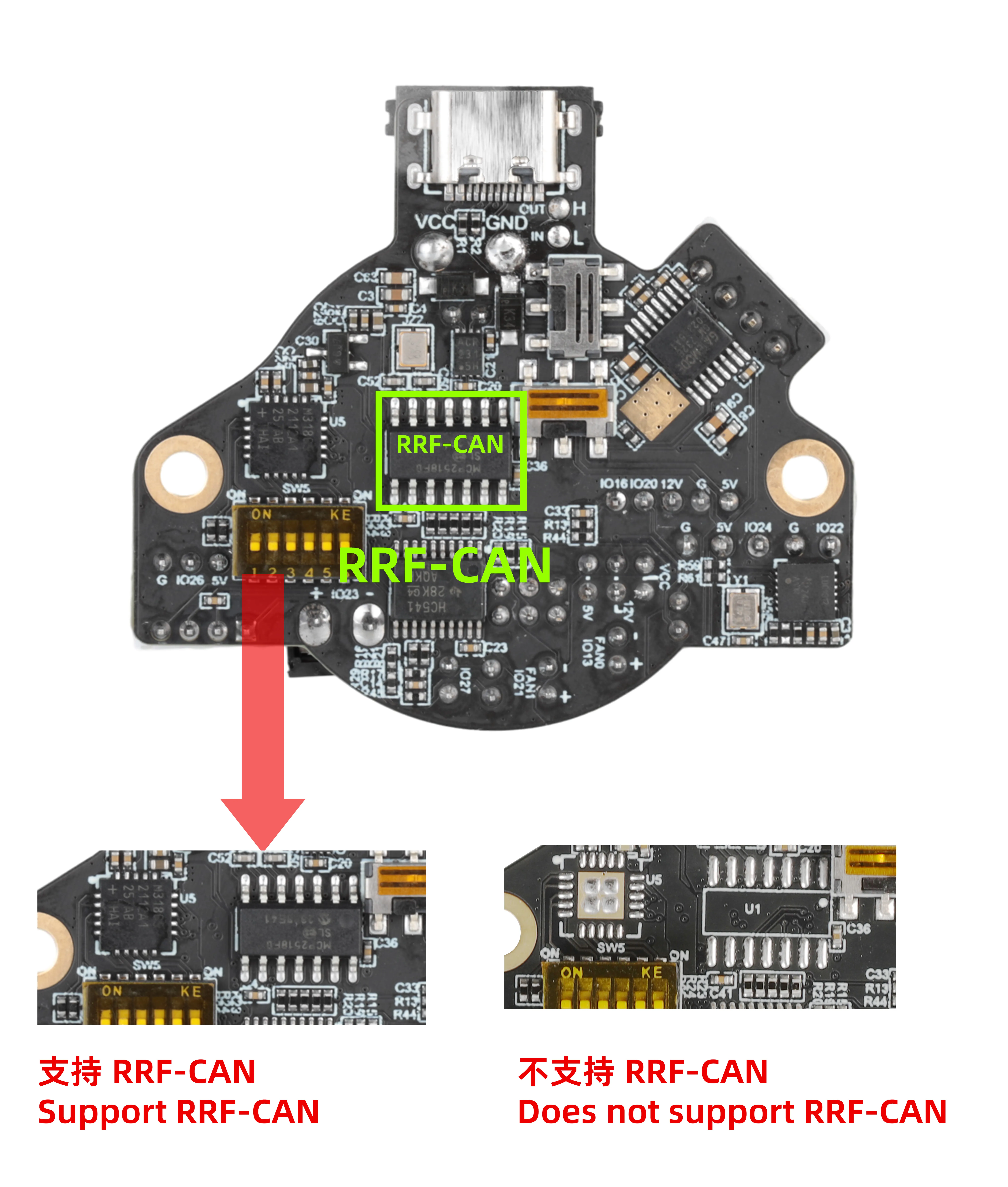
툴 보드가 RRF-CAN을 지원하는지 확인하는 방법
SHT36 V3의 일부 구성은 RRF-CAN을 지원합니다. 툴 보드에 RRF-CAN 칩이 있는지 확인하여 지원 여부를 판단할 수 있습니다(실물 위치는 아래 그림 참조).
펌웨어 다운로드
호환성 안내
Fly-SHT36 Max V3는 3.5.1 버전 이상의 펌웨어만 지원합니다.
펌웨어 파일 Duet3Firmware_SHT36MAX3.uf2 다운로드:
- 안정판:다운로드 링크
버전 일치 경고
반드시 툴 보드의 펌웨어 버전과 연결된 메인 보드의 펌웨어 버전이 완전히 동일해야 합니다.
플래싱 모드 진입 및 완료
-
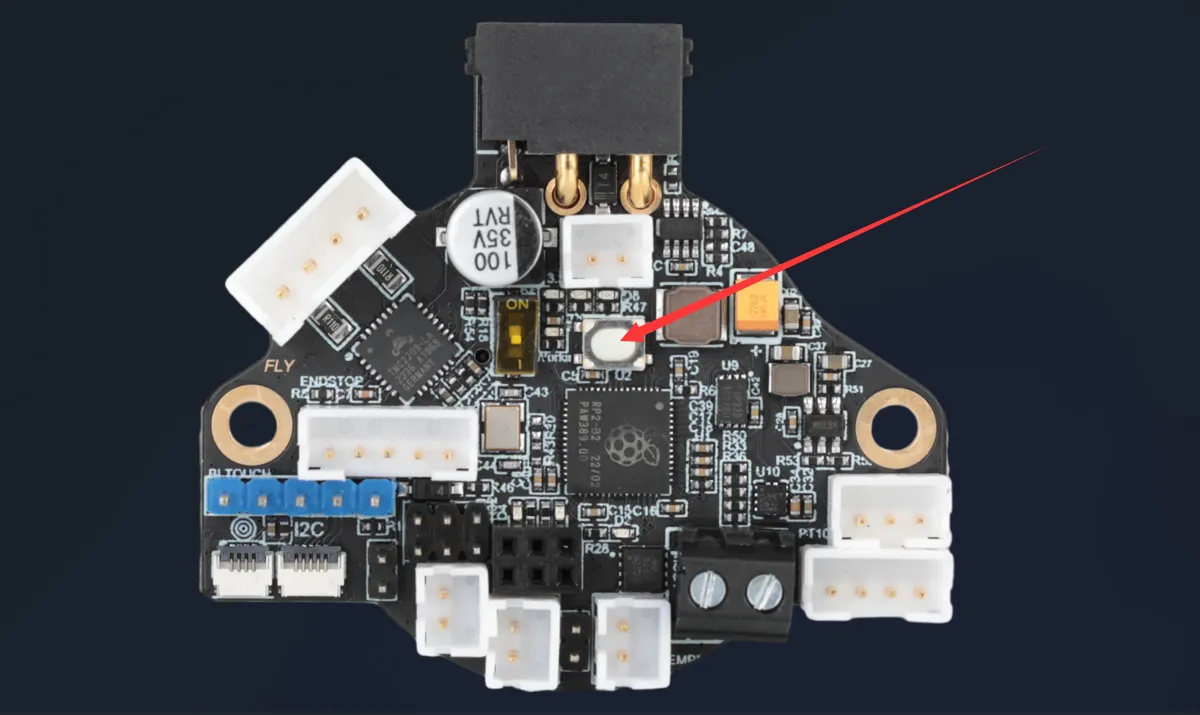
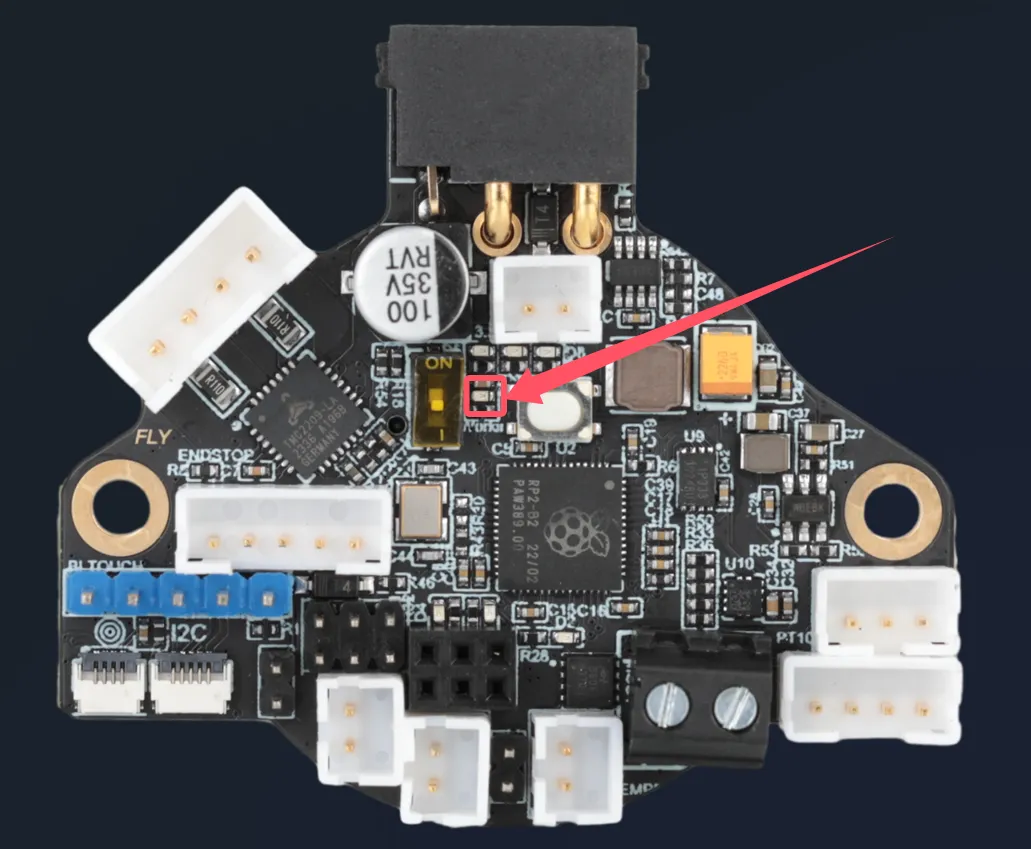
플래싱 모드 진입:
- 툴 보드에 전원을 완전히 차단합니다.
BOOT버튼(위치 아래 그림 참조)을 누른 상태에서 Type-C 데이터 케이블로 컴퓨터에 연결합니다.
-
플래싱 실행:
- 컴퓨터에
RPI라는 이름의 드라이브가 나타납니다. - 다운로드한
.uf2파일을 해당 드라이브로 드래그 앤 드롭하면 플래싱이 완료됩니다.
- 컴퓨터에
연결 확인 및 주소 설정
1. 전원 인가 확인
프린터에 전원을 인가한 후, 툴 보드를 확인하세요:
3.3V,5V및PowerLED가 항상 켜져 있어야 합니다.- 메인 칩 옆의 작동 상태 LED는 먼저 빠르게 깜빡이다가, 연결이 설정되면 약 1초에 한 번씩 깜빡입니다.
2. 통신 확인
호스트 콘솔에서 명령을 보내 툴 보드(기본 주소 124)와의 통신을 확인합니다:
M115 B124
이 명령은 툴 보드의 펌웨어 정보를 반환합니다.
3. CAN 주소 설정
충돌을 피하기 위해 각 툴 보드에 고유한 주소(20부터 시작하는 것을 권장)를 할당해야 합니다.
- 새 주소 할당(예: 주소
124를20으로 변경):M952 B124 A20 - 재시작하여 적용: 전원을 껐다 켜거나,
M999 B124명령을 보냅니다. - 새 주소 확인:
M115 B20 - 여러 개의 툴 보드: 각 보드마다 전원을 인가하고, 위 단계를 반복하여 서로 다른 주소(예:
21,22...)를 할당하세요.
4. 시작 지연 시간 설정
메인 보드가 모든 CAN 장치를 인식할 수 있도록 하려면, 메인 보드의 config.g 파일 상단에 다음을 추가하세요:
G4 S2 ; 확장 보드 시작 대기
Loading...