RRFファームウェアの書き込みと設定
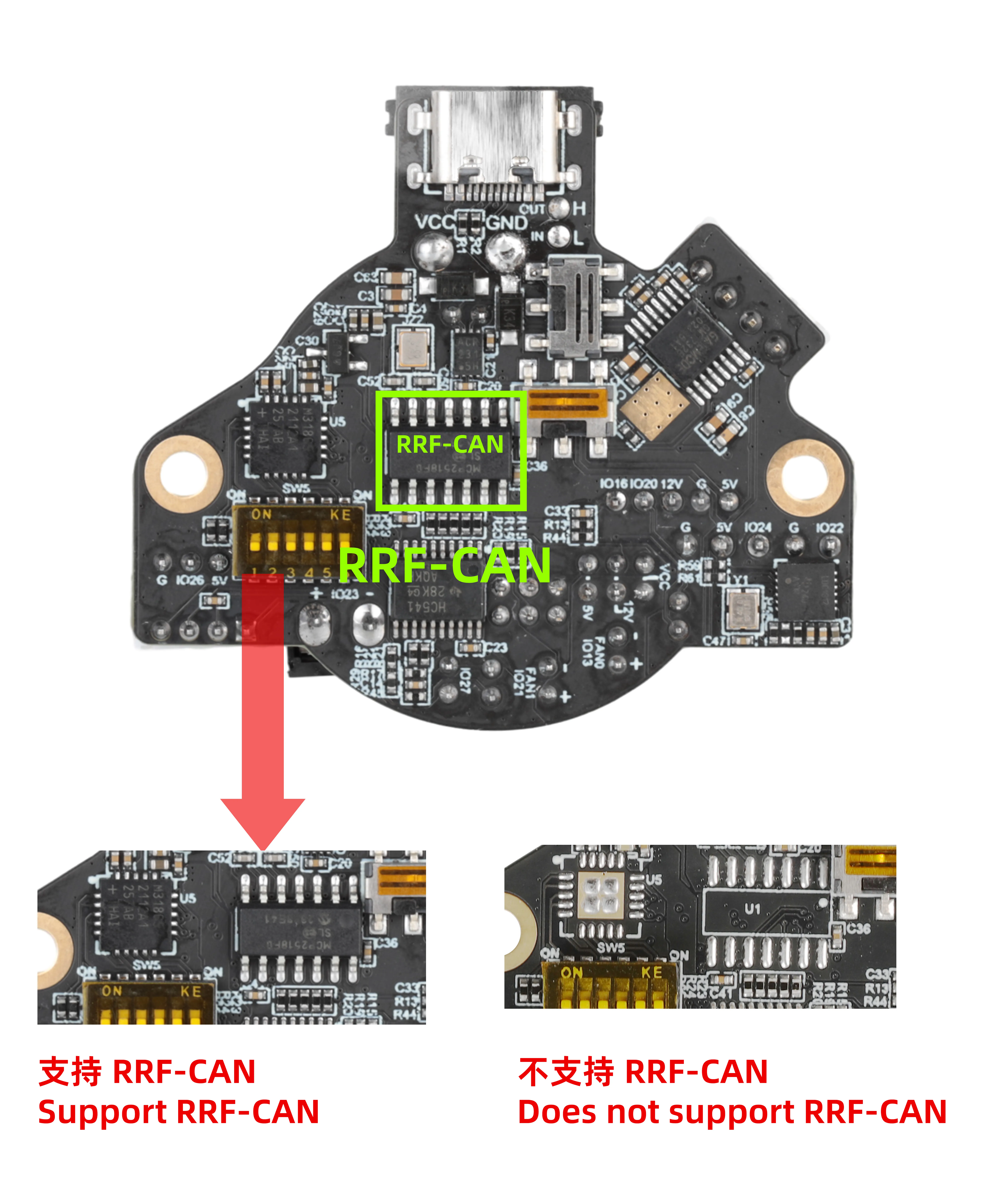
ツールボードがRRF-CANをサポートしているかどうかの判断方法
SHT36 V3の一部のセットはRRF-CANをサポートしています。ツールボードにRRF-CANチップが搭載されているかどうかで判断できます(実物の位置は下図を参照してください)。
ファームウェアのダウンロード
互換性に関する注意
Fly-SHT36 Max V3は、バージョン3.5.1以上のファームウェアのみをサポートしています。
ファームウェアファイル Duet3Firmware_SHT36MAX3.uf2 をダウンロードしてください:
- 安定版:ダウンロードリンク
バージョン一致に関する警告
ツールボードのファームウェアバージョンと、接続するメインボードのファームウェアバージョンが完全に同じであることを必ず確認してください。
書き込みモードへの移行と書き込みの完了
-
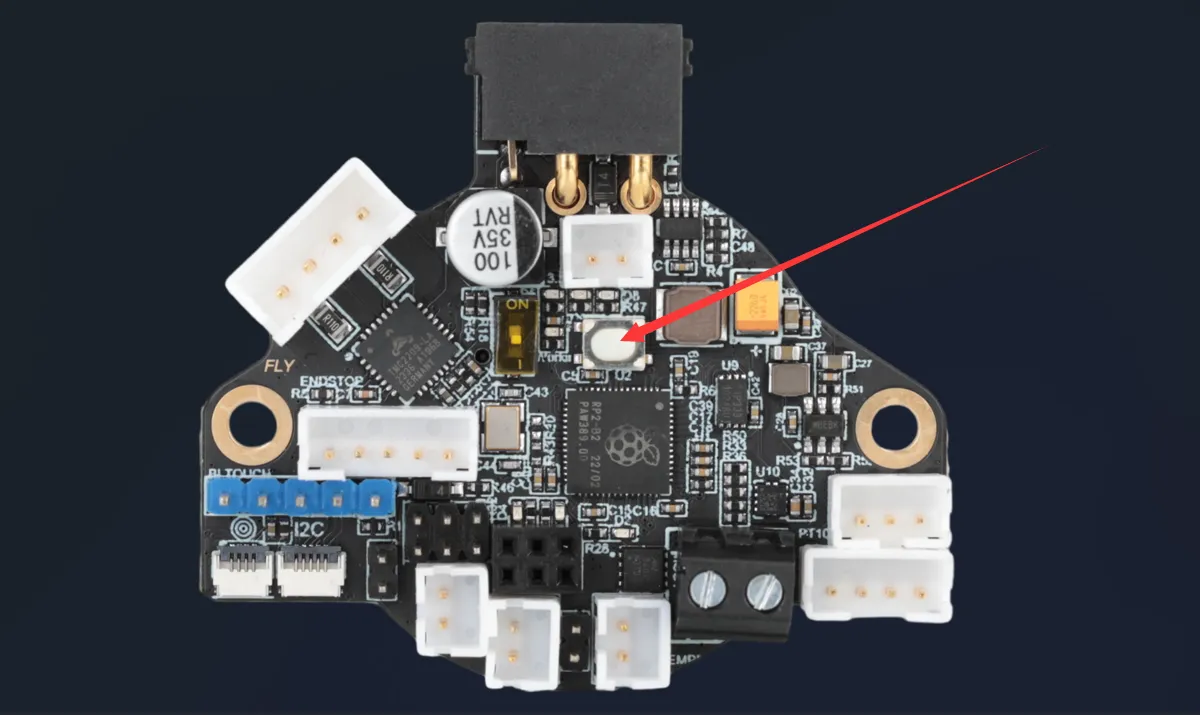
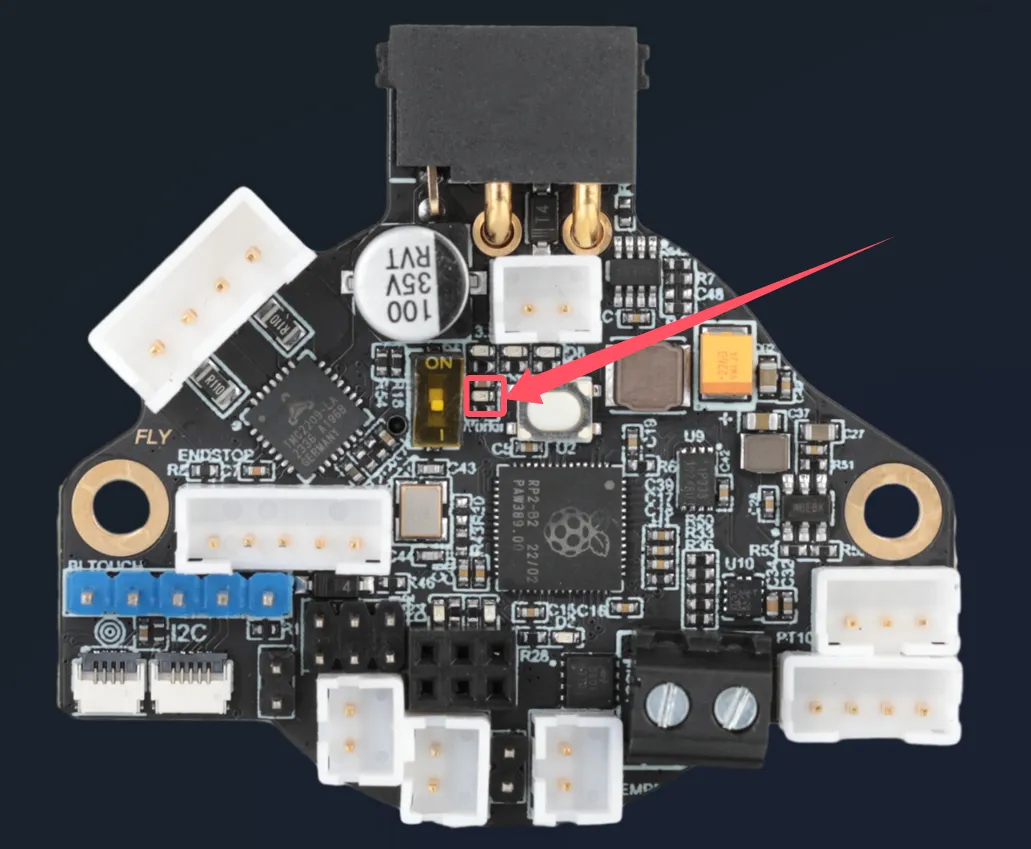
書き込みモードへの移行:
- ツールボードの電源を完全に切ります。
BOOTボタン(位置は下図)を押し続けながら、Type-Cケーブルでコンピュータに接続します。
-
書き込みの実行:
- コンピュータ上に
RPIという名前のドライブが表示されます。 - ダウンロードした
.uf2ファイルをそのドライブにドラッグ&ドロップするだけで書き込みが完了します。
- コンピュータ上に
接続確認とアドレス設定
1. 電源投入時の確認
プリンターに電源を入れた後、ツールボードを確認してください:
3.3V、5V、Powerの各LEDが点灯しているはずです。- メインチップ横の動作状態LEDは、最初は速く点滅し、接続が確立されると約1秒に1回の点滅に変わります。
2. 通信の検証
ホストコンソールでコマンドを送信し、ツールボード(デフォルトアドレス 124)との通信を確認します:
M115 B124
このコマンドは、ツールボードのファームウェア情報を返します。
3. CANアドレスの設定
競合を避けるため、各ツールボードに一意のアドレスを割り当てる必要があります(20 から始めることをお勧めします)。
- 新しいアドレスの割り当て(例:アドレス
124を20に変更):M952 B124 A20 - 再起動による有効化: 電源を切って入れ直すか、
M999 B124を送信します。 - 新しいアドレスの確認:
M115 B20 - 複数のツールボード: 電源を入れるたびに、各ボードに対して上記の手順を繰り返し、異なるアドレス(例:
21、22...)を割り当ててください。
4. 起動遅延の設定
メインボードがすべてのCANデバイスを認識できるようにするため、メインボードの config.g ファイルの先頭に以下を追加してください:
G4 S2 ; 拡張ボードの起動を待機
Loading...