CANファームウェア接続の注意事項
配線説明
以下の三つの手順を順番に完了してください:
ステップ1: ディップスイッチの設定
- まず電源を切る: すべての電源を抜きます。
- ディップスイッチを探す: ツールボードを裏返し、背面のディップスイッチ群を見つけます。
- 正しい位置に設定: CANモードを使用するには、すべてのスイッチを下記の例の位置に設定する必要があります。
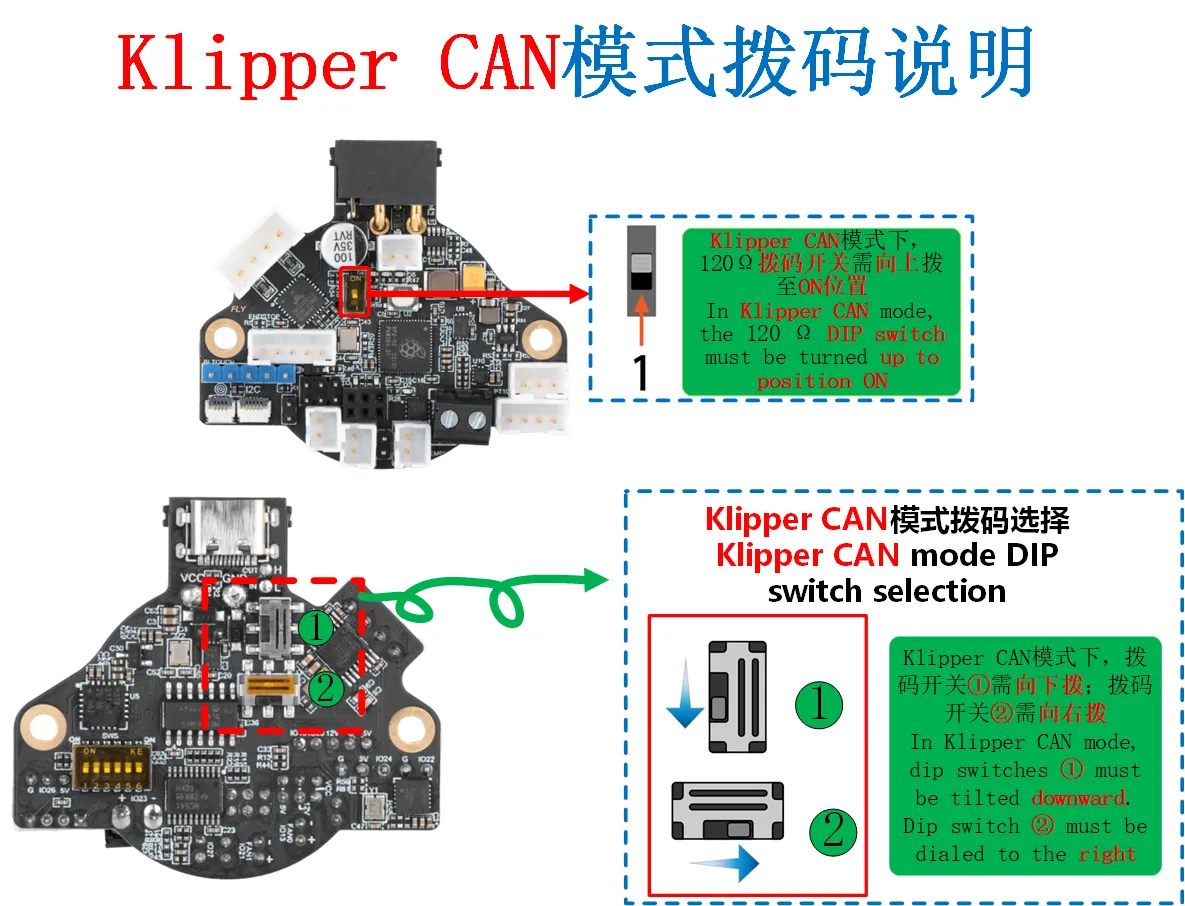
重要: ディップスイッチを変更した後は、必ず対応するファームウェア(本ガイドではCANファームウェア)を再書き込みしてください。
ステップ2: 配線接続
- 電源は切ったまま: 配線作業中は通電しないでください。
- ケーブルを準備:
XT30(2+2)-F4芯データケーブルを使用します。色の定義は以下の通りです:- 赤 (VCC): 12V-24V 電源の正極に接続
- 黒 (GND): 電源の負極に接続
- 黄 (CAN-H): CAN拡張ポートのHに接続
- 白/緑 (CAN-L): CAN拡張ポートのLに接続
- デバイスを接続:
- ケーブルの
XT30(2+2)-Fコネクタをツールボードに差し込みます。 - ケーブルの端子を UTOCモジュール または「USBブリッジCAN」ファームウェアが書き込まれたメインボードに接続します。
- 最後に、USBケーブルでUTOCモジュールまたはメインボードを上位機(FLY PiやRaspberry Piなど)に接続します。
- ケーブルの
ステップ3: ターミネータ抵抗の設定と確認
信号を安定させるため、ターミネータ抵抗を正しく接続する必要があります。以下の表に従って設定し、電源OFFの状態で測定してください:
| デバイス | 操作説明 |
|---|---|
| ツールボード | 120Ω と記載されたジャンパピンを見つけて取り付けます。 |
| メインボード | メインボードに接続する場合、同様に 120Ω ジャンパピンを取り付けてください。 |
| UTOCモジュール | 内蔵済み*。 |
確認方法:
- 完全に電源を切った状態を保ちます。
- テスターを使用して、ツールボードのCANポートの CAN-HとCAN-L 間の抵抗を測定します。
- 結果の判断:
- 約60Ω: 正常。両端の抵抗が正しく接続されています。
- 約140Ω: CAN-HとCAN-Lが逆接続されている可能性があります。
- 約120Ω:
120Ωジャンパピンが取り付けられていない、または断線しています。 - 約90Ω:
120Ωジャンパピンが片方のみ取り付けられています。 - 約40Ω: 余分な抵抗が接続されている可能性があります。中間ノードを確認してください。
一言でまとめ: まず電源を切り、ディップスイッチを正しく設定し、ケーブルを正しく接続し、両端の120Ωジャンパピンを接続し、最後に抵抗が約60Ωであることを確認します。
チェックリスト:
- 作業中は常に電源OFF
- ディップスイッチはすべて下(CANモード)に設定済み
- ツールボード
120Ωジャンパピン取り付け済み - メインボード(該当する場合)
120Ωジャンパピン取り付け済み - CANデータケーブル接続は確実
- 抵抗値は約60Ω
CANネットワーク設定とトラブルシューティング
ステップ1: 上位機がCANデバイスを認識しているか確認
- 上位機にログインし、コマンドを入力:
lsusb
- 結果を確認:
1d50:606fが表示される → デバイス認識成功lsコマンドが見つからないと表示される → 実行:sudo apt-get install usbutils- 何も反応がない → システムの問題の可能性があります。システムの変更を推奨します
- 複数の
1d50:606fが表示される → 1つのデバイスのみ接続することを推奨します(UTOCを使用する場合は、他のUSBブリッジCANファームウェアが書き込まれたデバイスを切断してください)
⚠️ 重要:
1d50:606fが表示されて初めて、CAN IDの検索を続行できます
ステップ2: CANネットワークの設定
システムタイプに応じて設定方法を選択:
すでに設定済みの場合、またはFlyOS-FASTシステムを使用している場合はこのステップは不要です!
- 通常のLinuxシステム
- Raspberry Piシステム
通常のLinuxシステムの設定方法
1Mレートを設定(推奨):
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 1000000
up ifconfig \$IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 1000000
pre-up ip link set can0 txqueuelen 1024
EOF
500Kレートを設定:
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 500000
up ifconfig \$IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 500000
pre-up ip link set can0 txqueuelen 1024
EOF
注意: FASTシステムではこの操作は不要です!
Raspberry Piシステムの設定方法
- ネットワーク設定を作成(BitRateは500000に変更可能):
sudo tee /etc/systemd/network/99-can.network > /dev/null <<'EOF'
[Match]
Name=can*
[CAN]
BitRate=1000000
RestartSec=100ms
EOF
- 接続設定を作成(TxQueueLengthは変更しないことを推奨):
sudo tee /etc/systemd/network/99-can.link > /dev/null <<'EOF'
[Match]
OriginalName=can*
[Link]
TxQueueLength=1024
EOF
- システムを再起動して有効化:
sudo reboot
ステップ3: CAN IDの検索
CAN状態の確認:
ip -details link show can0
- 下図の丸で囲んだ部分が上位機のCANレートとキャッシュです
- 上の
1024は現在のCAN0キャッシュ - 下の
1000000は現在のCAN0レート

デバイスの検索:
- Fly-Armbianと通常の上位機検索コマンド
- Fly-FAST検索コマンド
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
python ~/klipper/scripts/canbus_query.py can0
正常であれば、Found canbus_uuid=xxxx...と表示されます。
よくあるエラーと解決方法
| エラーメッセージ | 原因 | 解決方法 |
|---|---|---|
OSError: [Errno 19] No such device | CANデバイスが見つからない | 1. USB接続を確認 2. ファームウェアが正しいことを確認 3. lsusbを実行して確認 |
can.CanError: Failed to transmit: [Errno 100] Network is down | CANネットワークが設定されていない | 1. 上記の設定手順を実行 2. システムを再起動 |
can.CanError: Failed to transmit: [Errno 105] No buffer space available | キャッシュ不足 | 1. CANキャッシュが1024であることを確認2. システムを再起動 |
CAN IDが検索できない場合の確認手順
ステップ1: 基本確認
-
lsusbを実行して1d50:606fが表示される - CANデバイスとツールボードの電源が入っている
- データケーブルの接続が確実
ステップ2: 設定確認
- CANネットワークが正しく設定されている
- 上位機のCANレートとツールボードのファームウェアが一致している(デフォルト1M)
- システムを再起動済み
ステップ3: ハードウェア確認
- CANバスの両端に120Ωターミネータ抵抗がある
- 電源OFFでCAN-HとCAN-L間の抵抗が≈60Ωである
- ケーブルに断線がない
- CAN-HとCAN-Lが逆接続されていない
ステップ4: 特殊な状況への対応
-
Klipperが既にIDを使用している場合:
- Klipper設定内の該当設定を無効化
- 完全に電源を切り1分間待機
- 再度電源を入れて検索
-
ターミネータ抵抗の測定値:
- ≈60Ω: 正常
- ≈120Ω: 片端のみ抵抗あり
- ≈40Ω: 三端に抵抗あり
- ≈140Ω: ケーブル接続が逆の可能性
迅速なトラブルシューティング手順
- まずデバイス確認:
lsusb→1d50:606fはあるか? - 次に設定確認:
ip -details link show can0→ レートは正しいか? - 最後にハードウェア確認: 電源OFFで抵抗測定 → 約60Ωか?
すべて確認してもダメな場合: データケーブルやデバイスの交換を試すか、技術サポートに連絡してください。
ツールボードファームウェア更新手順
ステップ1: 準備作業
- チュートリアルに従って新しいファームウェアファイルをコンパイル
- Klipperサービスを停止:
sudo systemctl stop klipper
ステップ2: ツールボードIDの取得
Klipper設定ファイル内で、対応するツールボードのCAN UUIDを探します(例: 241696050c56)
ステップ3: ファームウェア更新の実行
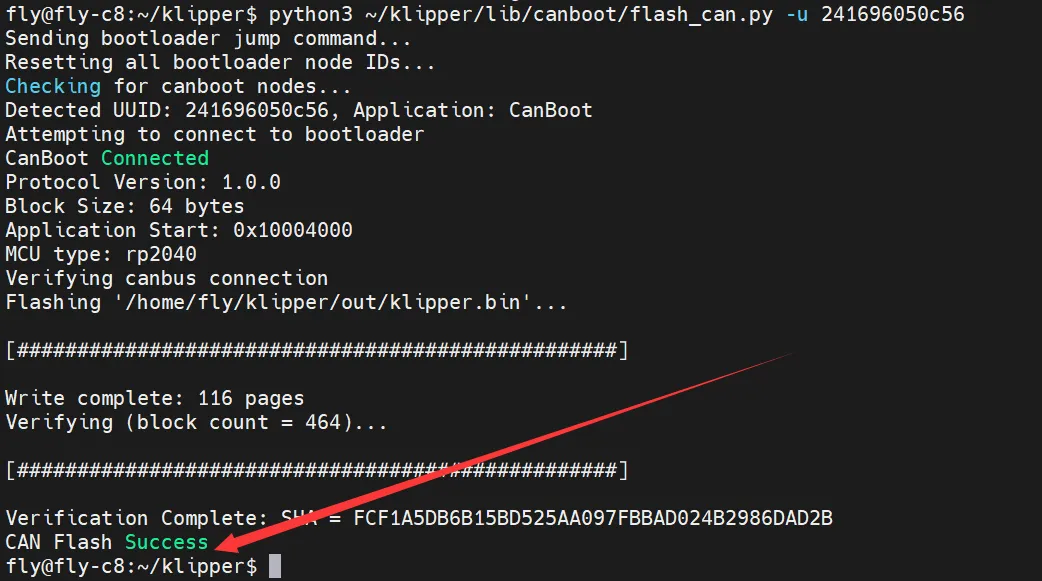
以下のコマンドを使用してファームウェアを書き込みます(241696050c56を実際のCAN UUIDに置き換えてください):
python3 ~/klipper/lib/canboot/flash_can.py -u 241696050c56
ステップ4: 結果の確認
CAN Flash Successと表示される → 書き込み成功- その他のエラーメッセージが表示される → 書き込み失敗。UUIDと接続を確認してください
注意:
-uの後にはスペースを1つ入れ、その後にツールボードのCAN UUIDを入力してください
ステップ5: サービスの再起動
sudo systemctl start klipper
更新完了!
Loading...