Points d'attention pour la connexion du firmware CAN
Instructions de câblage
Veuillez effectuer les trois opérations suivantes dans l'ordre :
Étape 1 : Configurer les commutateurs DIP
- Couper l'alimentation d'abord : Débranchez toutes les sources d'alimentation.
- Localiser les commutateurs DIP : Retournez la carte outil. Trouvez le groupe de commutateurs DIP au dos.
- Positionner correctement : Pour utiliser le mode CAN, tous les commutateurs doivent être positionnés comme dans l'exemple ci-dessous.
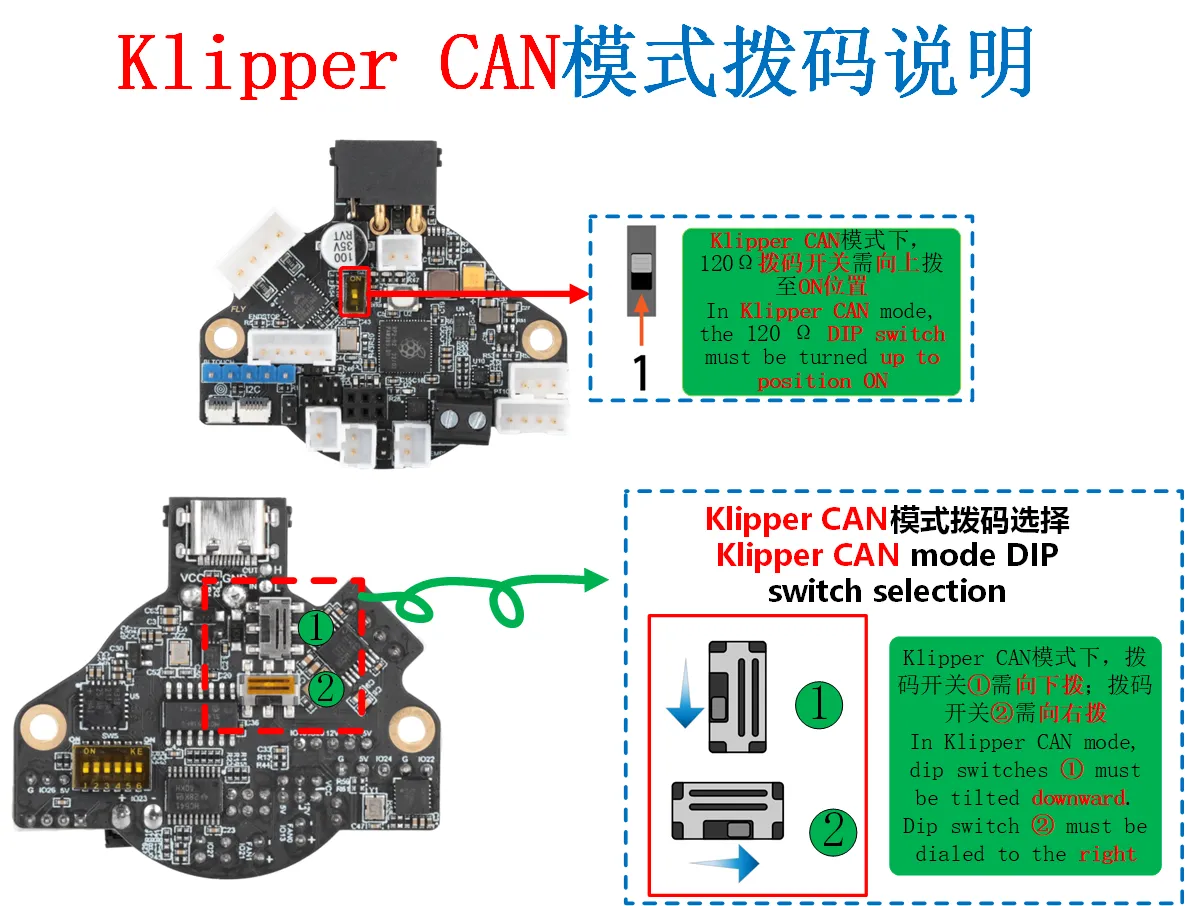
Important : Après modification des commutateurs DIP, vous devez re-flasher le firmware correspondant (ce guide utilise le firmware CAN).
Étape 2 : Connecter les câbles
- Maintenir hors tension : Ne mettez pas sous tension pendant toute la durée du câblage.
- Préparer le câble : Utilisez un câble de données 4 fils
XT30(2+2)-F. Sa définition des couleurs est la suivante :- Rouge (VCC) : Connectez à la borne positive de l'alimentation 12V-24V
- Noir (GND) : Connectez à la borne négative de l'alimentation
- Jaune (CAN-H) : Connectez à H du port d'extension CAN
- Blanc/Vert (CAN-L) : Connectez à L du port d'extension CAN
- Connecter les appareils :
- Branchez le connecteur
XT30(2+2)-Fdu câble sur la carte outil. - Connectez les bornes du câble au module UTOC ou à une carte mère déjà flashée avec le firmware "USB bridge CAN".
- Enfin, connectez le module UTOC ou la carte mère à votre ordinateur hôte (comme FLY Pi ou Raspberry Pi) via un câble USB.
- Branchez le connecteur
Étape 3 : Configurer et vérifier la résistance de terminaison
Pour assurer la stabilité du signal, la résistance de terminaison doit être correctement connectée. Veuillez configurer selon le tableau ci-dessous et mesurer hors tension :
| Appareil | Instructions |
|---|---|
| Carte outil | Trouvez et insérez le cavalier marqué 120Ω. |
| Carte mère | Si connecté à une carte mère, insérez également son cavalier 120Ω. |
| Module UTOC | Résistance intégrée*. |
Comment vérifier :
- Maintenez l'appareil complètement hors tension.
- Utilisez un multimètre pour mesurer la résistance entre CAN-H et CAN-L du port CAN de la carte outil.
- Interprétation du résultat :
- Environ 60Ω : Normal. Les résistances aux deux extrémités sont correctement connectées.
- Environ 140Ω : CAN-H et CAN-L sont peut-être inversés.
- Environ 120Ω : Le cavalier
120Ωn'est pas installé ou il y a une coupure de fil. - Environ 90Ω : Un seul cavalier
120Ωest installé. - Environ 40Ω : Il y a peut-être une résistance supplémentaire. Vérifiez les nœuds intermédiaires.
En résumé : Coupez l'alimentation, positionnez les commutateurs DIP, branchez correctement les câbles, connectez les cavaliers 120Ω aux deux extrémités, et enfin mesurez que la résistance est d'environ 60Ω.
Liste de contrôle :
- Opérations effectuées hors tension
- Tous les commutateurs DIP sont en position basse (mode CAN)
- Le cavalier
120Ωde la carte outil est inséré - Le cavalier
120Ωde la carte mère (le cas échéant) est inséré - Le câble de données CAN est solidement connecté
- La valeur de résistance mesurée est d'environ 60Ω
Configuration du réseau CAN et dépannage
Étape 1 : Vérifier si l'ordinateur hôte reconnaît le périphérique CAN
- Connectez-vous à l'ordinateur hôte et entrez la commande :
lsusb
- Observez le résultat :
- Vous voyez
1d50:606f→ Périphérique reconnu avec succès - Message
ls: command not found→ Exécutez :sudo apt-get install usbutils - Aucune réaction → Problème système probable, envisagez de changer de système
- Plusieurs
1d50:606f→ Il est recommandé de ne conserver qu'un seul périphérique (par exemple, déconnectez les autres appareils flashés avec le firmware "USB bridge CAN" si vous utilisez UTOC)
⚠️ Important : Vous ne pouvez rechercher l'ID CAN que si vous voyez
1d50:606f
Étape 2 : Configurer le réseau CAN
Choisissez la méthode de configuration selon le type de système :
Si déjà configuré ou si vous utilisez le système FlyOS-FAST, cette étape n'est pas nécessaire !
- Système Linux standard
- Système Raspberry Pi
Méthode de configuration pour système Linux standard
Définir le débit à 1M (recommandé) :
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 1000000
up ifconfig \$IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 1000000
pre-up ip link set can0 txqueuelen 1024
EOF
Définir le débit à 500K :
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 500000
up ifconfig \$IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 500000
pre-up ip link set can0 txqueuelen 1024
EOF
Remarque : Le système FAST ne nécessite pas cette opération !
Méthode de configuration pour système Raspberry Pi
- Créer la configuration réseau (BitRate peut être modifié en 500000) :
sudo tee /etc/systemd/network/99-can.network > /dev/null <<'EOF'
[Match]
Name=can*
[CAN]
BitRate=1000000
RestartSec=100ms
EOF
- Créer la configuration de liaison (TxQueueLength n'est pas recommandé de modifier) :
sudo tee /etc/systemd/network/99-can.link > /dev/null <<'EOF'
[Match]
OriginalName=can*
[Link]
TxQueueLength=1024
EOF
- Redémarrer le système pour appliquer :
sudo reboot
Étape 3 : Rechercher l'ID CAN
Vérifier l'état du CAN :
ip -details link show can0
- Les zones entourées dans l'image ci-dessous indiquent le débit et le cache CAN de l'ordinateur hôte.
- Le
1024en haut est le cache actuel de CAN0. - Le
1000000en bas est le débit actuel de CAN0.

Rechercher les appareils :
- Commande de recherche pour Fly-Armbian et hôtes standard
- Commande de recherche pour Fly-FAST
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
python ~/klipper/scripts/canbus_query.py can0
Normalement, cela affichera : Found canbus_uuid=xxxx...
Résolution des erreurs courantes
| Message d'erreur | Cause | Solution |
|---|---|---|
OSError: [Errno 19] No such device | Périphérique CAN introuvable | 1. Vérifier la connexion USB 2. Confirmer que le firmware est correct 3. Exécuter lsusb pour vérifier |
can.CanError: Failed to transmit: [Errno 100] Network is down | Réseau CAN non configuré | 1. Exécuter les étapes de configuration ci-dessus 2. Redémarrer le système |
can.CanError: Failed to transmit: [Errno 105] No buffer space available | Cache insuffisant | 1. Vérifier que le cache CAN est 10242. Redémarrer le système |
Étapes de vérification si l'ID CAN n'est pas trouvé
Étape 1 : Vérifications de base
- Exécuter
lsusbmontre1d50:606f - Le périphérique CAN et la carte outil sont sous tension
- Le câble de données est solidement connecté
Étape 2 : Vérification de la configuration
- Le réseau CAN est correctement configuré
- Le débit CAN de l'ordinateur hôte correspond à celui du firmware de la carte outil (1M par défaut)
- Le système a été redémarré
Étape 3 : Vérification matérielle
- Les deux extrémités du bus CAN ont une résistance de terminaison de 120Ω
- Mesurer hors tension la résistance entre CAN-H et CAN-L ≈ 60Ω
- Vérifier qu'il n'y a pas de coupure dans les câbles
- CAN-H et CAN-L ne sont pas inversés
Étape 4 : Gestion des cas particuliers
-
Si Klipper occupe déjà l'ID :
- Désactiver la configuration correspondante dans Klipper
- Couper complètement l'alimentation pendant 1 minute
- Remettre sous tension et rechercher à nouveau
-
Valeurs mesurées de la résistance de terminaison :
- ≈60Ω : Normal
- ≈120Ω : Une seule extrémité a une résistance
- ≈40Ω : Trois extrémités ont une résistance
- ≈140Ω : Les fils sont peut-être inversés
Ordre de dépannage rapide
- Vérifier d'abord le périphérique :
lsusb→ Y a-t-il1d50:606f? - Vérifier ensuite la configuration :
ip -details link show can0→ Le débit est-il correct ? - Vérifier enfin le matériel : Mesurer la résistance hors tension → Environ 60Ω ?
Si le problème persiste après toutes ces vérifications : Essayez de changer le câble de données ou l'appareil, ou contactez le support technique.
Étapes de mise à jour du firmware de la carte outil
Étape 1 : Préparation
- Compiler le nouveau fichier de firmware selon le tutoriel
- Arrêter le service Klipper :
sudo systemctl stop klipper
Étape 2 : Obtenir l'ID de la carte outil
Trouvez le CAN UUID de la carte outil correspondante dans le fichier de configuration Klipper (par exemple : 241696050c56)
Étape 3 : Exécuter la mise à jour du firmware
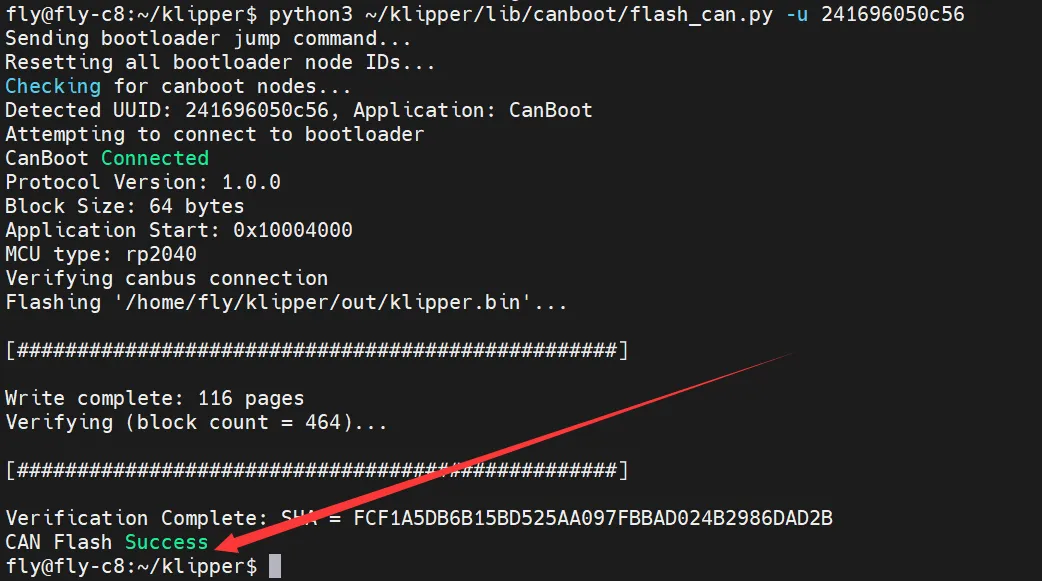
Utilisez la commande suivante pour flasher le firmware (remplacez 241696050c56 par votre CAN UUID réel) :
python3 ~/klipper/lib/canboot/flash_can.py -u 241696050c56
Étape 4 : Vérifier le résultat
- Vous voyez le message
CAN Flash Success→ Flash réussi - Vous voyez un autre message d'erreur → Échec du flash, vérifiez l'UUID et la connexion
Remarque : Il doit y avoir un espace après
-u, suivi du CAN UUID de votre carte outil.
Étape 5 : Redémarrer le service
sudo systemctl start klipper
Mise à jour terminée !