배선 및 설정
버퍼 내부 배선도
설치 동영상
버퍼를 메인보드에 연결하고 설정하는 방법
- 기본 기능
- 트리거 버퍼 급이 또는 리트랙트 기능 사용
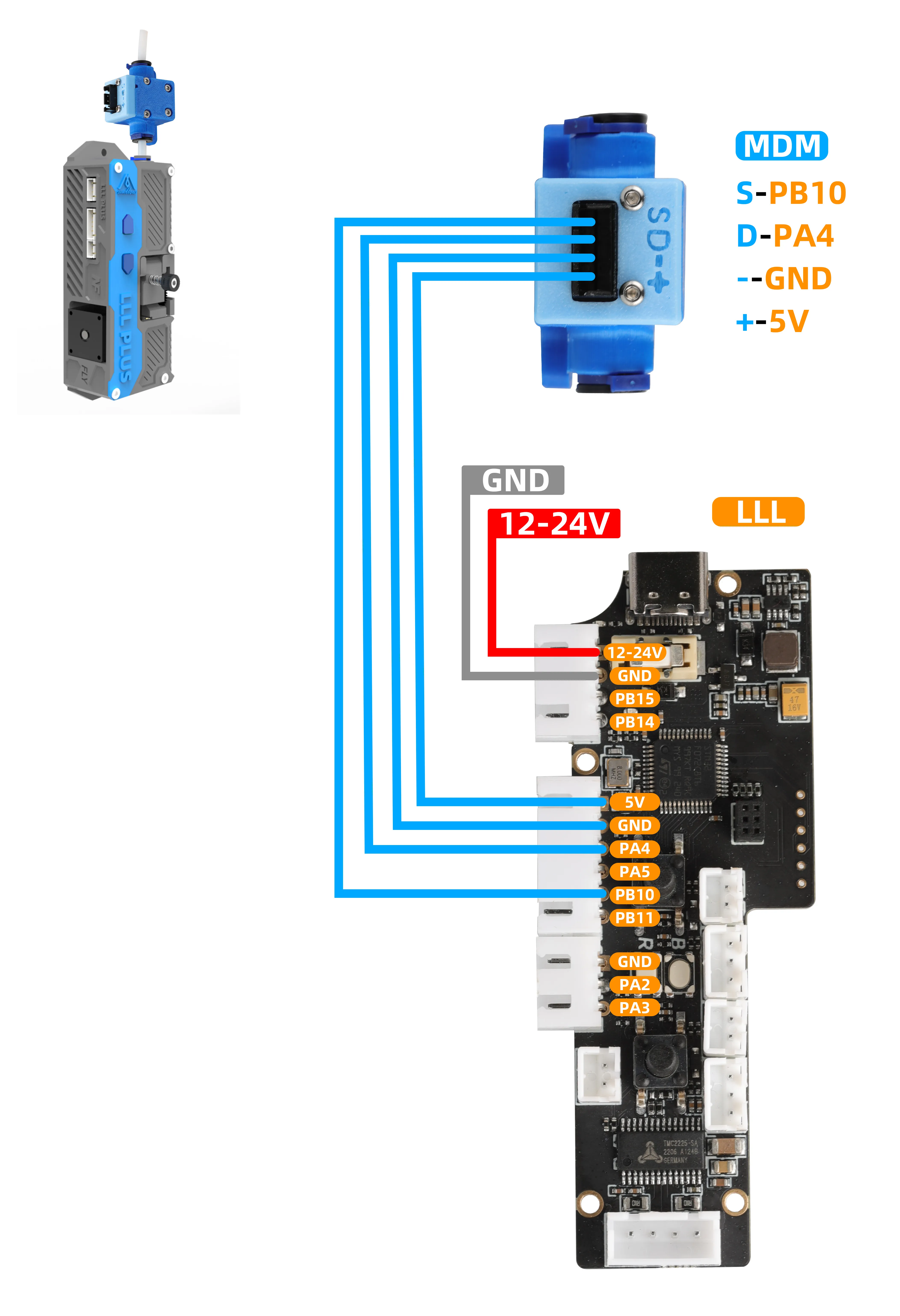
- MDM 센서 배선 및 설정 방법
-
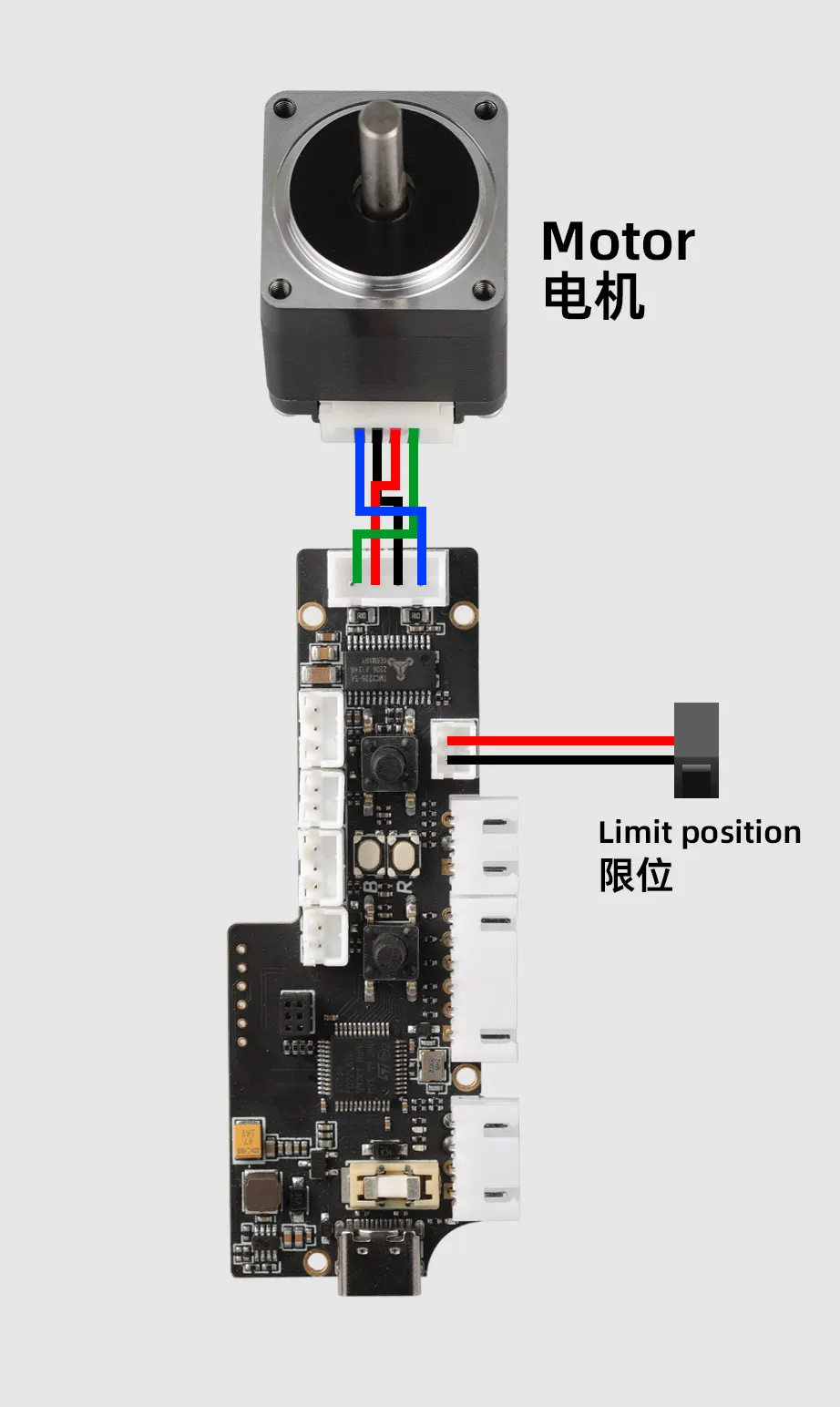
본 버퍼에는 필라멘트 감지 및 수동 제어 기능이 통합되어 있습니다:
-
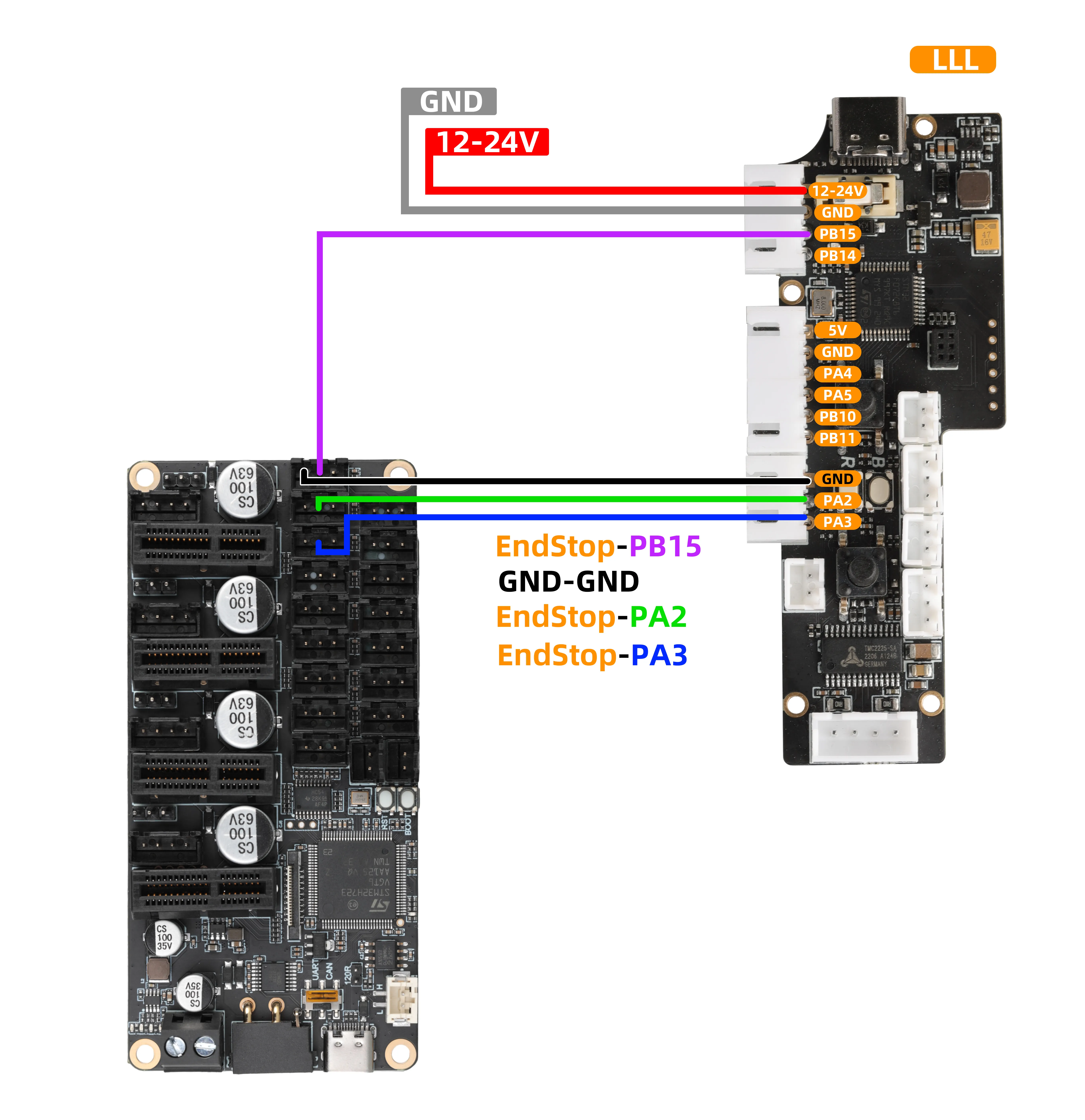
필라멘트 감지 (FILAMENT_SENSOR)
- 신호 출력: 필라멘트가 끊어지면 버퍼의
PB15핀에서 로우 레벨 신호가 출력됩니다.
- 신호 출력: 필라멘트가 끊어지면 버퍼의
-
급이 버튼 (FEED)
- 단일 클릭: 버퍼의
PA2핀에서 3초 동안 하이 레벨 펄스 신호가 출력됩니다. - 길게 누름: 버퍼가 버튼을 놓을 때까지 지속적인 급이를 수행합니다.
- 단일 클릭: 버퍼의
-
리트랙트 버튼 (RETRACT)
- 단일 클릭: 버퍼의
PA3핀에서 3초 동안 로우 레벨 펄스 신호가 출력됩니다. - 길게 누름: 버퍼가 버튼을 놓을 때까지 지속적인 리트랙트를 수행합니다.
- 단일 클릭: 버퍼의
배선 안내
-
위 기능을 사용할 경우 다음 그림과 같이 배선하십시오:
중요 안내
- 그림의
MMU 툴보드는 인터페이스 정의 참고용입니다. 실제 사용 시 다음 사항을 준수하십시오:
- 케이블을 메인보드(예: Klipper, Marlin 보드)의 리미트 스위치 신호 포트에 직접 연결하십시오.
- 설정 파일(예:
printer.cfg)에서 PD3, PD4, PD5에 해당하는 포트 번호 설정을 수정 및 확인하여 기능이 정상적으로 작동하도록 하십시오.
설정 참고 사항
[mcu LLL_PLUS]
serial:/dev/serial/by-id/usb-Klipper_stm32h723xx_12345-if00
[filament_switch_sensor Material_breakage_detection]
pause_on_runout: true
switch_pin: ^LLL_PLUS:PD3
runout_gcode:
PAUSE
RESPOND MSG="material shortage"
insert_gcode:
RESPOND MSG="Detected"
event_delay: 1.0
pause_delay: 0.5
[gcode_button Load_consumables]
pin:^LLL_PLUS:PD4 # 사용 중인 핀으로 교체, 급이 핀에 연결
press_gcode:
_Load_consumables
[gcode_button RETRACT]
pin:^!LLL_PLUS:PD5 # 사용 중인 핀으로 교체, 리트랙트 핀에 연결
press_gcode:
_RETRACT
[gcode_macro CONFIG]
description: 익스튜더 설정
variable_extruder_temp: 200 ## 온도
variable_extruder_length: 50 ## 길이
variable_extruder_speed: 5 ## 속도 (mm/s)
gcode:
[gcode_macro _Load_consumables] ## 급이
gcode:
{% set temp = printer["gcode_macro CONFIG"].extruder_temp %}
{% set length = printer["gcode_macro CONFIG"].extruder_length %}
{% set speed = printer["gcode_macro CONFIG"].extruder_speed %}
{% set feedrate = speed * 60 %}
RESPOND MSG="Heat the extruder to {temp} °C"
RESPOND MSG="가열 익스튜더 {temp} °C"
M109 S{temp}
RESPOND MSG="Start feeding {length}mm"
RESPOND MSG="{length}mm 급이 시작"
G91 ; 상대 좌표 모드
G1 E{length} F{feedrate}
G90 ; 절대 좌표 모드
RESPOND MSG="Extrusion completed"
RESPOND MSG="압출 완료"
M104 S0
[gcode_macro _RETRACT] ## 리트랙트
gcode:
{% set temp = printer["gcode_macro CONFIG"].extruder_temp %}
{% set length = printer["gcode_macro CONFIG"].extruder_length %}
{% set speed = printer["gcode_macro CONFIG"].extruder_speed %}
{% set feedrate = speed * 60 %}
RESPOND MSG="Heat the extruder to {temp} °C"
RESPOND MSG="가열 익스튜더 {temp} °C"
M109 S{temp}
RESPOND MSG="Start material return {length}mm"
RESPOND MSG="{length}mm 재료 회수 시작"
G91 ; 상대 좌표 모드
G1 E-{length} F{feedrate}
G90 ; 절대 좌표 모드
RESPOND MSG="Return of materials completed"
RESPOND MSG="재료 회수 완료"
M104 S0
-
펌웨어를
V1.1.0으로 업데이트해야 합니다. -
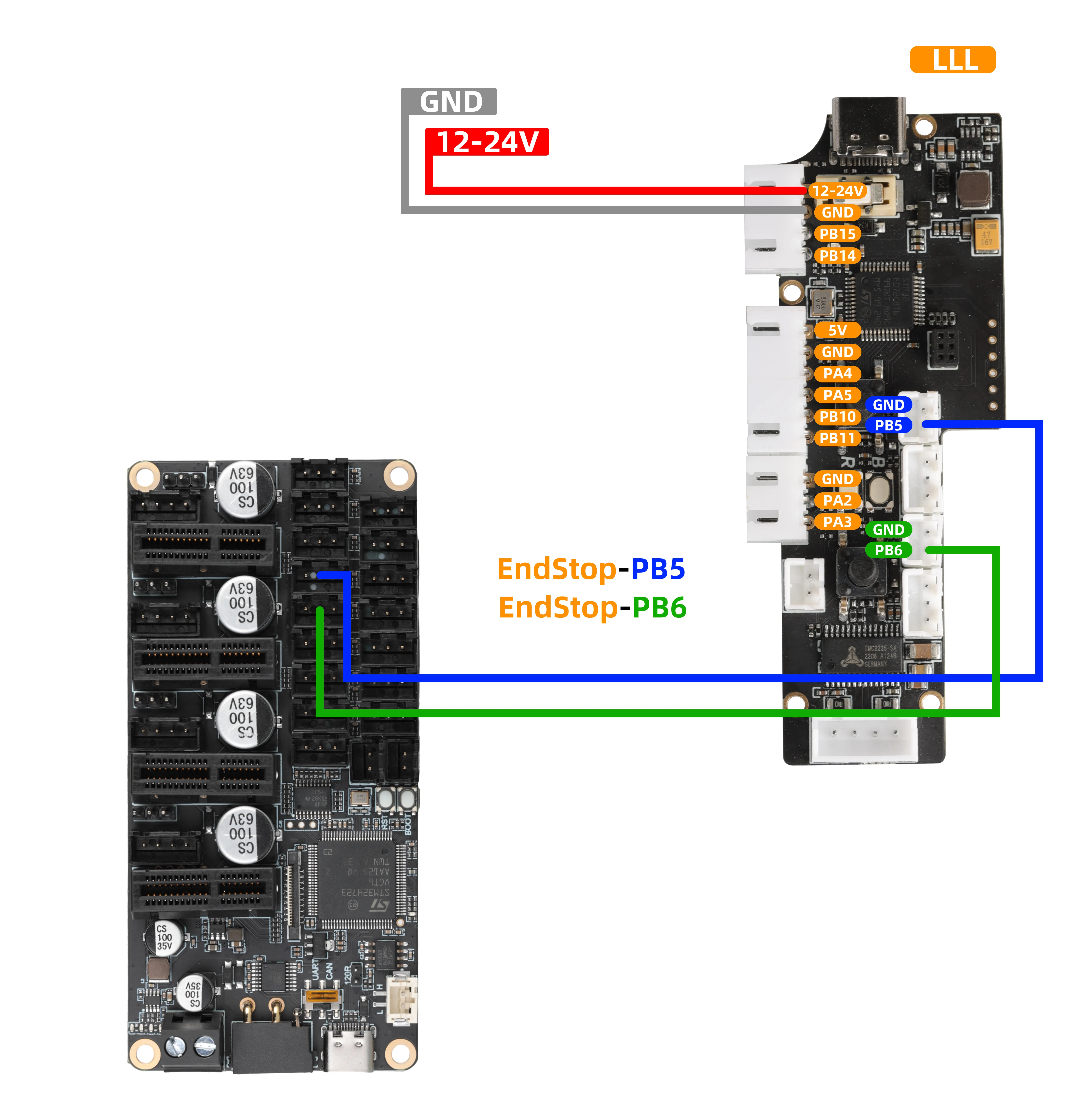
버퍼는 다음 핀의 레벨 상태를 감지하여 자동 지속 급이를 수행할 수 있습니다:
-
자동 급이: 핀
PB5에서 로우 레벨 신호를 감지하면 버퍼가 지속적인 급이를 실행합니다. -
자동 리트랙트: 핀
PB6에서 로우 레벨 신호를 감지하면 버퍼가 지속적인 리트랙트를 실행합니다.
배선 안내
- 위 기능을 사용할 경우 다음 그림과 같이 배선하십시오:
중요 안내
- 그림의
MMU 툴보드는 인터페이스 정의 참고용입니다. 실제 사용 시 다음 사항을 준수하십시오:
- 케이블을 메인보드(예: Klipper, Marlin 보드)의 리미트 스위치 신호 포트에 직접 연결하십시오.
- 설정 파일(예:
printer.cfg)에서 PB5와 PB6에 해당하는 포트 번호 설정을 수정 및 확인하여 기능이 정상적으로 작동하도록 하십시오.
설정 참고 사항
- 설정 추가
- 아래 설정은 기본 기능을 추가한 후 아래 설정을 추가해야 합니다.
[output_pin _feeding]
pin:LLL_PLUS:PD6
shutdown_value: 0
value:0
[output_pin _material_return]
pin:LLL_PLUS:PD7
shutdown_value: 0
value:0
[gcode_macro Buffer_feeding] ## 버퍼 급이
gcode:
{% set temp = printer["gcode_macro CONFIG"].extruder_temp %}
{% set length = printer["gcode_macro CONFIG"].extruder_length %}
{% set speed = printer["gcode_macro CONFIG"].extruder_speed %}
{% set feedrate = speed * 60 %}
RESPOND MSG="Heat the extruder to {temp} °C"
RESPOND MSG="가열 익스튜더 {temp} °C"
M109 S{temp}
RESPOND MSG="Start feeding {length}mm"
RESPOND MSG="{length}mm 급이 시작"
SET_PIN PIN=_feeding VALUE=1
G91 ; 상대 좌표 모드
G1 E{length} F{feedrate}
G90 ; 절대 좌표 모드
RESPOND MSG="Extrusion completed"
RESPOND MSG="압출 완료"
SET_PIN PIN=_feeding VALUE=0
M104 S0
[gcode_macro RBuffer_material_return] ## 버퍼 리트랙트
gcode:
{% set temp = printer["gcode_macro CONFIG"].extruder_temp %}
{% set length = printer["gcode_macro CONFIG"].extruder_length %}
{% set speed = printer["gcode_macro CONFIG"].extruder_speed %}
{% set feedrate = speed * 60 %}
RESPOND MSG="Heat the extruder to {temp} °C"
RESPOND MSG="가열 익스튜더 {temp} °C"
M109 S{temp}
RESPOND MSG="Start material return {length}mm"
RESPOND MSG="{length}mm 재료 회수 시작"
SET_PIN PIN=_material_return VALUE=1
G91 ; 상대 좌표 모드
G1 E-{length} F{feedrate}
G90 ; 절대 좌표 모드
SET_PIN PIN=_material_return VALUE=0
RESPOND MSG="Return of materials completed"
RESPOND MSG="재료 회수 완료"
M104 S0
기능 소개
FLY-MDM필라멘트 감지/막힘 센서와 함께 사용하면 버퍼로 막힘 감지 기능을 구현할 수 있습니다.- 펌웨어를
V1.1.0으로 업데이트해야 합니다.
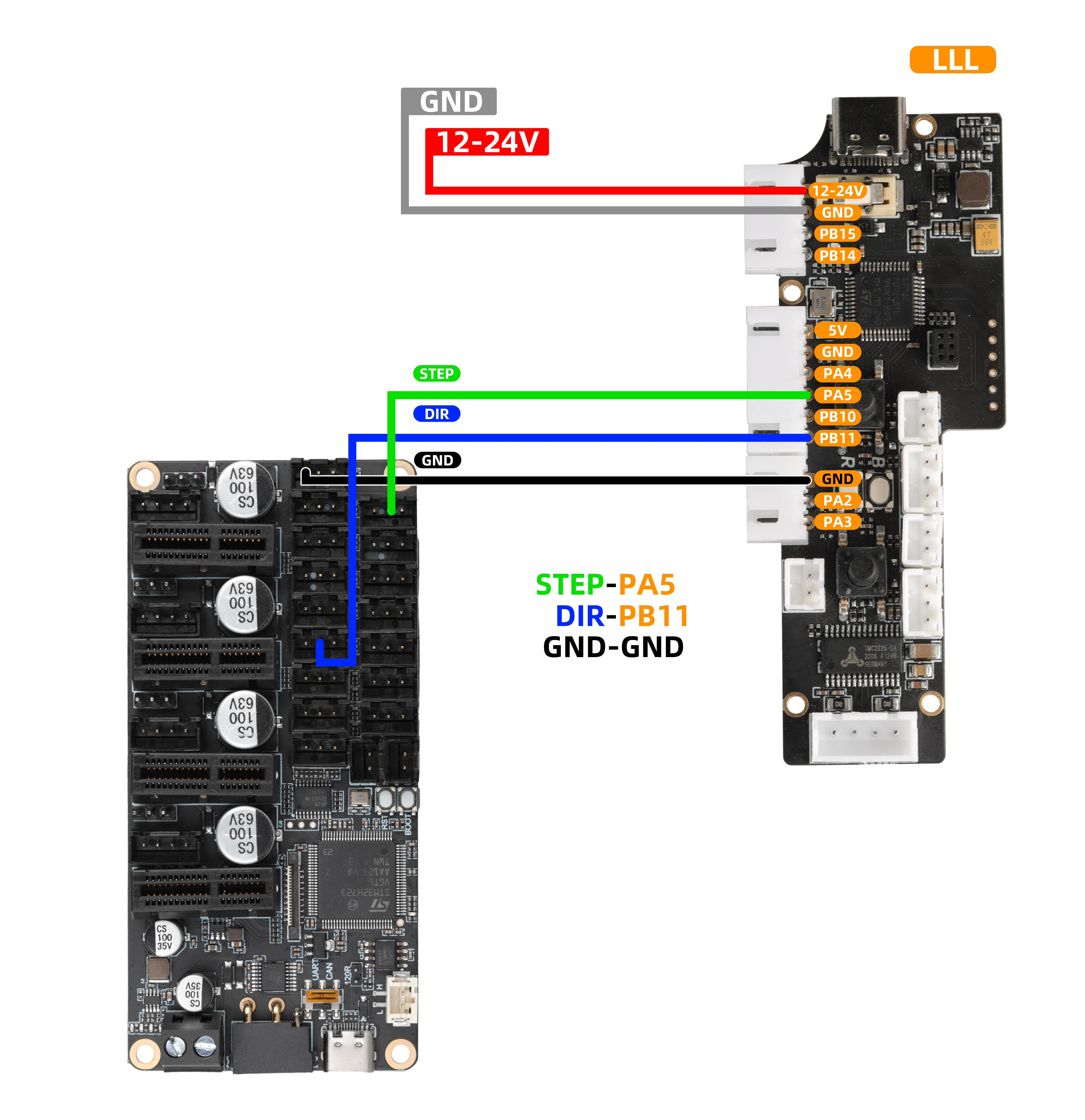
하드웨어 배선
- 버퍼의 신호선은 메인보드의 사용되지 않은 일반 디지털 출력 핀에 연결되어야 합니다. 예:
STEP버퍼의PA5를 메인보드의PWM, RGB, 12864중 하나에 연결하면 됩니다.BL-Touch의 서보 포트도 사용할 수 있습니다.DIR버퍼의PB11을 메인보드의 리미트 포트에 연결하면 됩니다.
-
이 연결은 익스튜더 모터의 작동 상태를 모니터링하여 막힘 감지를 구현하는 핵심입니다.
-
위 기능을 사용할 경우 다음 그림과 같이 배선하십시오:
중요 안내
- 그림의
MMU 툴보드는 인터페이스 정의 참고용입니다. 실제 사용 시 다음 사항을 준수하십시오:
- 케이블을 메인보드(예: Klipper, Marlin 보드)의 리미트 스위치 신호 포트에 직접 연결하십시오.
- 설정 파일(예:
printer.cfg)에서 PD3와 PC0에 해당하는 포트 번호 설정을 수정 및 확인하여 기능이 정상적으로 작동하도록 하십시오.
- MDM 참조 배선
설정 참고 사항
- 설정 추가
- 아래 설정은 기본 기능을 추가한 후 아래 설정을 추가해야 합니다.
- 아래 설정의
STEP및DIR은 배선한 포트 번호로 수정해야 합니다. - 다른 설정은 익스튜더 설정에 맞게 수정해야 막힘 감지 실패가 발생하지 않습니다.
[extruder_stepper my_extra_stepper]
extruder = extruder
step_pin: LLL_PLUS:PE10
dir_pin: LLL_PLUS:PD4
rotation_distance: 17.472
gear_ratio:50:10
microsteps:16
full_steps_per_rotation: 200
버퍼 파라미터 설정
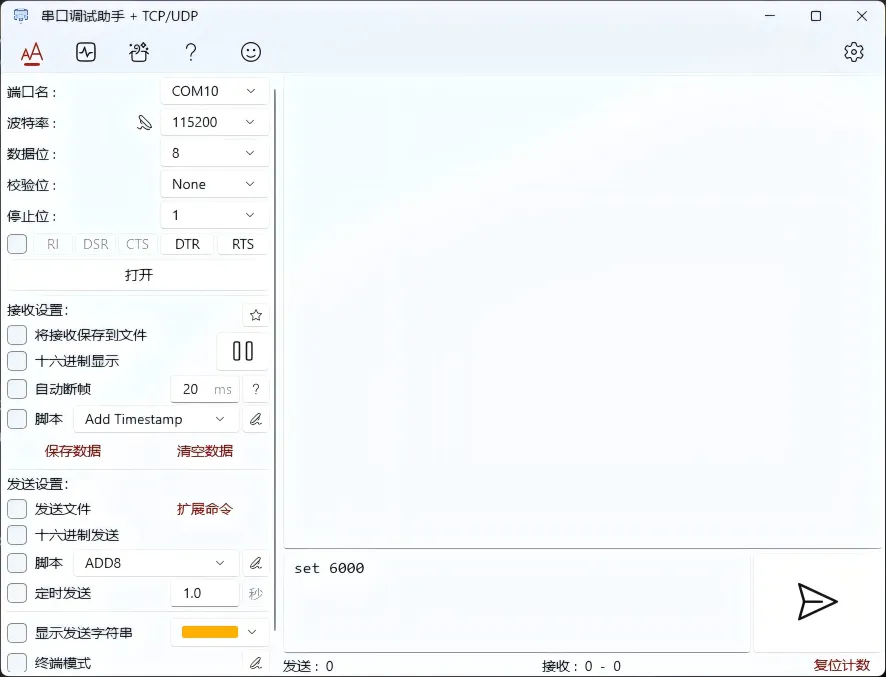
시리얼 포트 도구 다운로드- 모듈과 컴퓨터를
USB케이블로 연결하고 시리얼 포트 도구를 열어 해당 포트 번호를 선택하고, 보드레이트를 115200으로 설정한 후 연결을 클릭하십시오.
주의 사항
- 익스튜더 설정에
gear_ratio가 없을 경우드라이브 기어 수와드라이브 기어 수를1로 변경하십시오.
Loading...
매개변수 설명
| 기능 설명 | 설정 명령어(시리얼 툴에서 입력해 주세요) | 기본값 | 단위 | 비고 |
|---|---|---|---|---|
| 현재 모든 파라미터 확인 | Loading... | - | - | 명령어를 전송하여 현재 모든 설정을 읽습니다. |
| 모터 펄스 수 설정 | Loading... | 916 | - | 모터가 1mm 이동하는 데 필요한 펄스 수를 설정합니다. |
| 인코더 감지 거리 설정 | Loading... | 1.73 | mm | 각 인코더 신호당 소모품 이동 거리를 설정합니다. |
| 작동 시간 초과 설정 | Loading... | 60000 | ms | 트리거가 없는 상태에서 자동으로 정지하는 시간을 설정하여 지속적인 압출을 방지합니다. |
| 오차 스케일 계수 설정 | Loading... | 2.0 | - | 허용 오차 = encoder 값 × scale 값.예: 1.73 * 2.0 = 3.46 mm |
작업 안내:
- 명령 형식: 위 표의 "설정 명령어" 열에서, 해당 행 전체(예:
steps 916)를 그대로 입력해야 합니다. - 전송 방법: 시리얼 어시스트의 송신 창에 명령어를 입력한 후 송신 버튼을 클릭합니다.
- 자동 저장: 명령어 전송이 성공하면 파라미터는 즉시 적용되고 자동 저장되므로 별도로 저장 작업을 수행할 필요가 없습니다.
- 설정 확인: 파라미터를 수정한 후에는
info명령어를 전송하여 현재 모든 파라미터를 조회하고 설정이 올바른지 확인할 수 있습니다.
Loading...