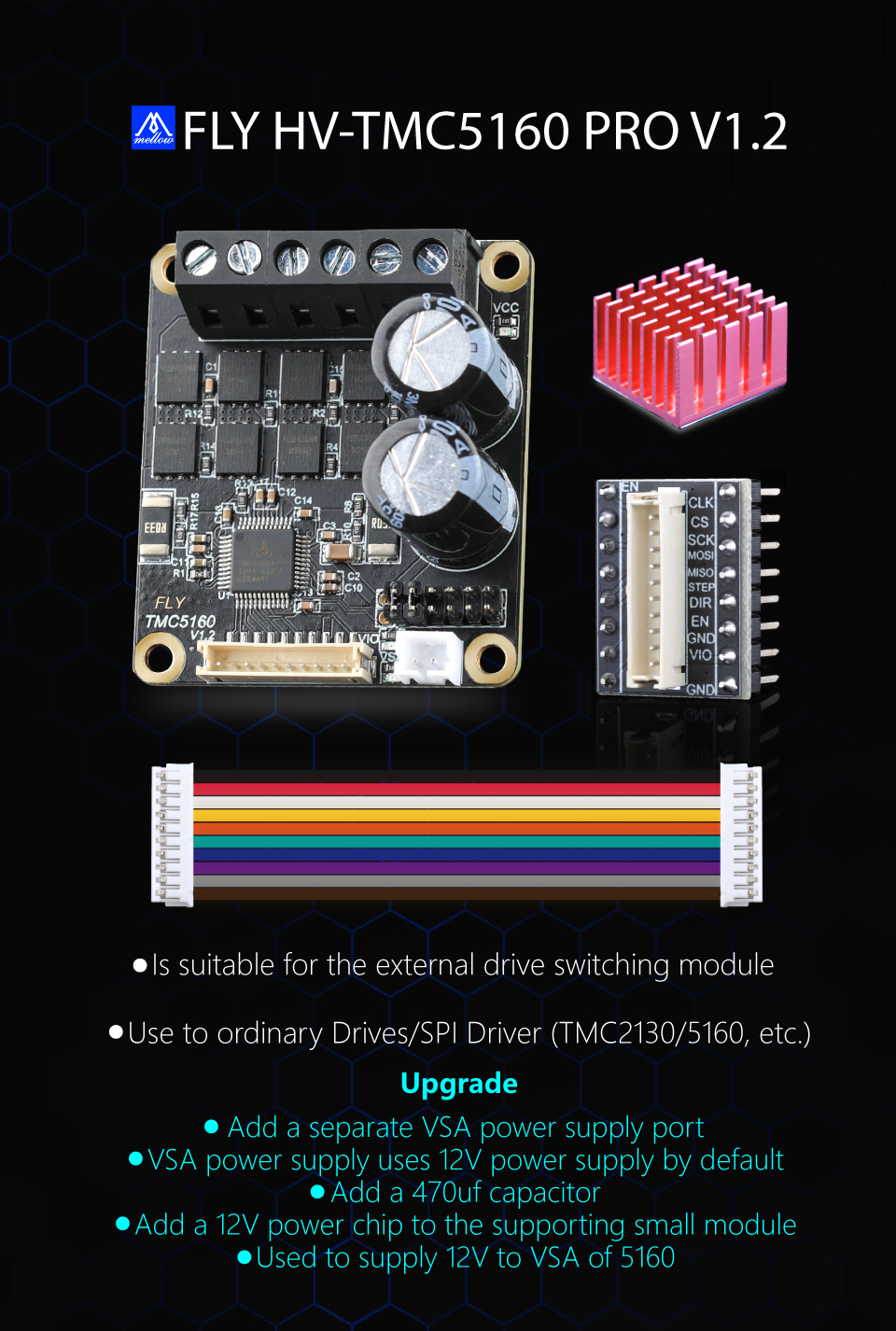
TMC 5160 Pro V1.5
Basic Parameters
- Input Voltage: 24-48V
- Maximum Current: 6A
- Suitable for: Marlin/Klipper/RRF firmware
- Driver Mode Support: TMC: SPI
- Stepper/Direction Interface with microPlyer for micro-stepping interpolation
- Highest Resolution: 256 microsteps
- Supports stealthChop2 silent operation and smooth motion
- Supports resonance suppression at mid-frequency
- Supports spreadCycle high dynamic motor control chopper
- Supports dcStep load-related speed control
- Supports stallGuard2 high precision sensorless motor load detection
- Supports coolStep current control, up to 75% energy saving
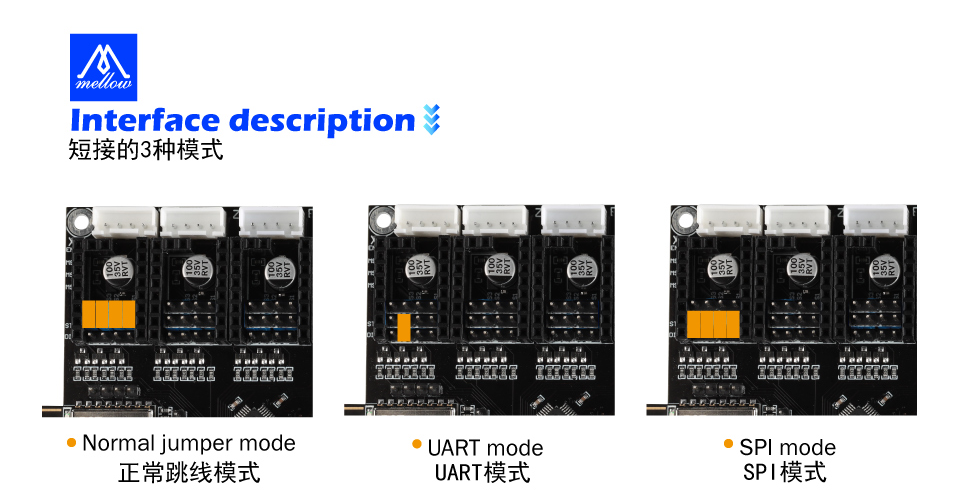
Jumper Explanation for Mainboard
- TMC5160 Pro uses SPI jumpers
- The SPI pin for FLY drive is the fourth pin from the top on the left side, and the CS pin is the SPI pin. If the mainboard does not have the corresponding pin position, SPI cannot be used.
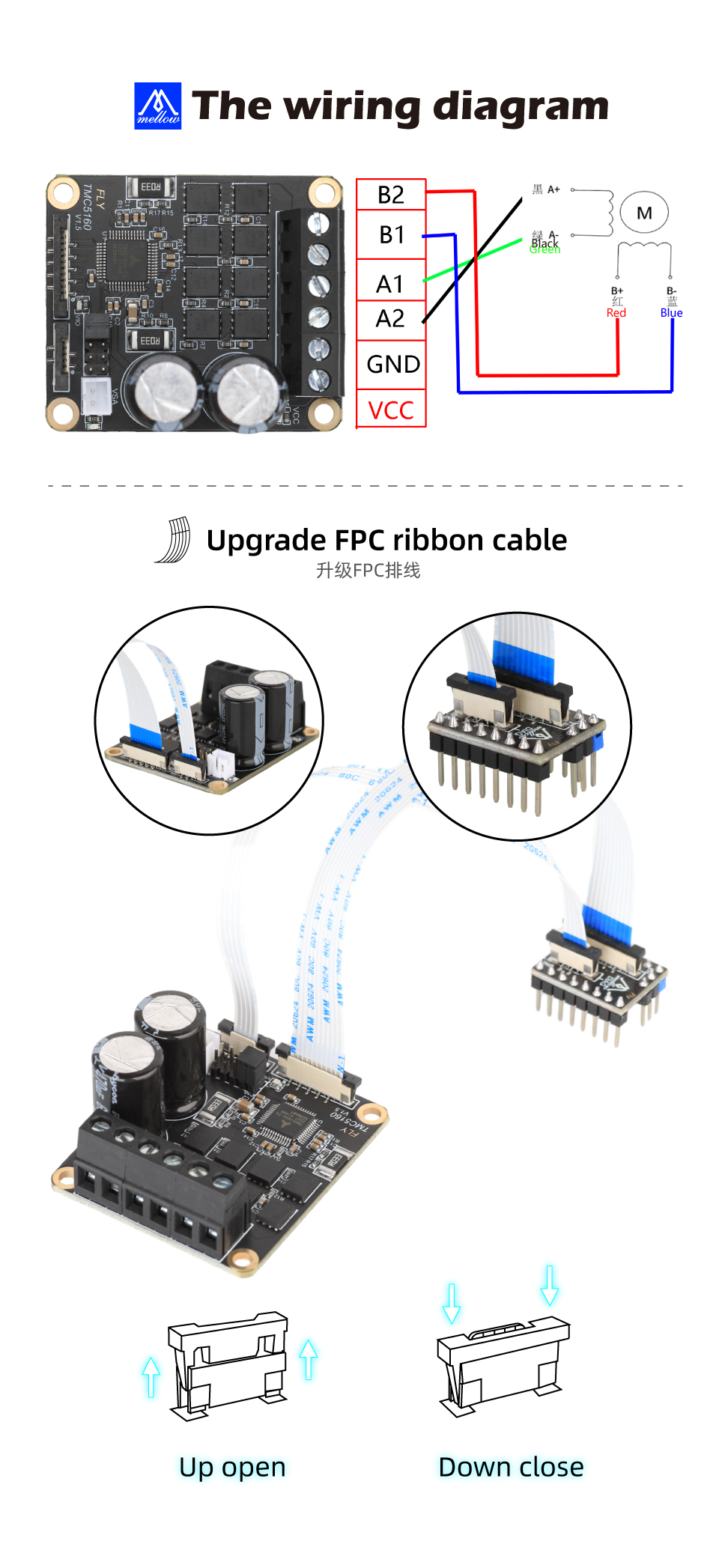
Installation of Mainboard FPC
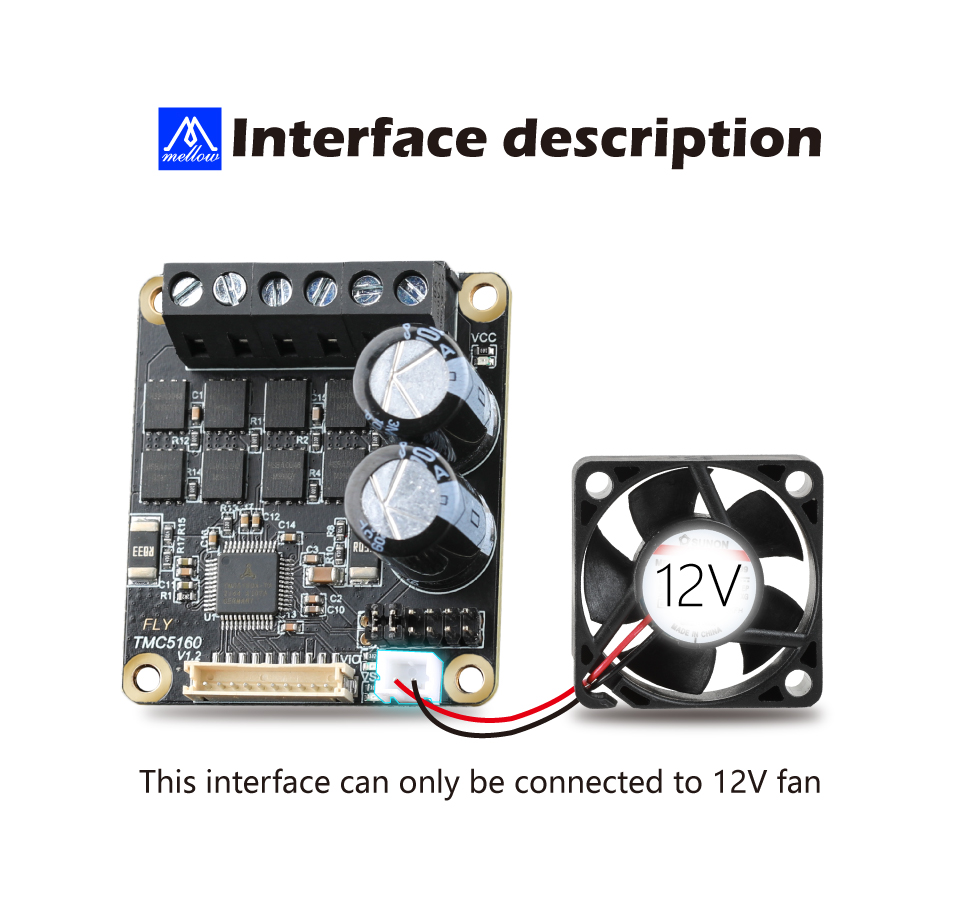
Wiring for 12V FAN
Reference Configuration for TMC5160 Pro
dangerous
- The sampling resistor for the driver is
sense_resistor: 0.033. Please do not set it incorrectly. - Only one of
spi_busandspi_softwarecan be selected.
Reference Configuration for SPI Mode
[tmc5160 stepper_x]
cs_pin:
spi_bus:
# spi_software_mosi_pin:
# spi_software_miso_pin:
# spi_software_sclk_pin:
run_current: 1.0 # Motor running current value
interpolate: False # Whether to enable 256 microstep interpolation (enable is True, disable is False)
sense_resistor: 0.033
stealthchop_threshold: 0
driver_DISS2G: 1
driver_DISS2VS: 1
Usage Instructions for Endstop-Free Operation
Infinite Position Usage Tip
- Infinite position usage requires occupying a limit port, normally IO1 is used for the first drive position, IO2 for the second drive position, and so on.
- When using infinite position, please make sure not to connect anything to the corresponding limit port.
- For some FLY motherboards, the drive ports are directly connected, please pay attention to whether DIAG is directly connected to the corresponding pin.
Endstop-Free Usage Tips
- This driver needs to have a 4-pin FPC installed to be usable.
- The original
endstop_pin:needs to be disabled or deleted, andendstop_pin: tmc5160_stepper_x:virtual_endstopshould be added. - After configuring
diag0_pin:, the limit status should be untriggered. - The value for
driver_SGT:needs to be tested and set appropriately.
- Reference Configuration
[stepper_x]
# endstop_pin:PF3
endstop_pin: tmc5160_stepper_x:virtual_endstop
homing_retract_dist: 0 # Retract distance should not be changed to 0 as it may cause homing failure
[tmc5160 stepper_x]
diag0_pin: ^!
driver_SGT: 1
# Ensure that the limit status is untriggered after configuration.
# This pin usually uses the "^" prefix to enable internal pull-up.
# Sensitivity is related to belt tension and needs to be adjusted accordingly.
# (Ensure that `driver_SGTHRS` is set to an appropriate sensitivity.)