Компиляция прошивки CAN
Начало компиляции
-
Требуется ПК с установленным и запущенным сервисом
klipperПодключение через SSH по сети -
Убедитесь, что устройство правильно подключено к ПК
-
Важно: используйте обычный ПК, например, Raspberry Pi или FLY-пай. Если вы используете модифицированный ПК (например, Wi-Fi адаптер, Redmi и т.д.), то из-за большого количества проблем мы не сможем предоставить вам техническую поддержку
заметка -
Для переключения с пользователя ROOT на обычного пользователя введите следующую команду
-
Не используйте пользователя ROOT
-
Для пользователя fly просто введите:
su fly. Для других пользователей замените<ваше имя пользователя>на имя пользователя вашего ПК!
su <имя пользователя вашего ПК>
:::
- 请确保上位机可以正常联网
- 固件编译前需要使用SSH通过网络登录上位机
- 请不要使用串口工具登录上位机
Klipper固件编译和配置页面操作说明
请确保键盘输入法为半角模式,即英文模式
- 键盘上键
↑,下键↓,用于上下移动光标来选中菜单项 - 确认键
Enter或 空格键Space,用于勾选菜单或进入子菜单 - 退出键
ESC,用于返回上一级菜单 Q键,用于退出Klipper固件配置页面Y键,在退出Klipper固件配置页面时,如果有提示,则点击Y键保存配置文件
如果配置页面选项比较少,请先勾选[ ] Enable extra low-level configuration options,用于显示部分隐藏选项
Ниже описан процесс компиляции прошивки:
-
Подключившись к SSH, введите следующую команду и нажмите Enter:
cd ~/klipper && rm -rf ~/klipper/.config && rm -rf ~/klipper/out && make menuconfig -
Где
rm -rf ~/klipper/.config && rm -rf ~/klipper/out— это удаление предыдущих данных компиляции и прошивки, аmake menuconfig— это команда для компиляции прошивки. После выполнения команды должно появиться следующее окно: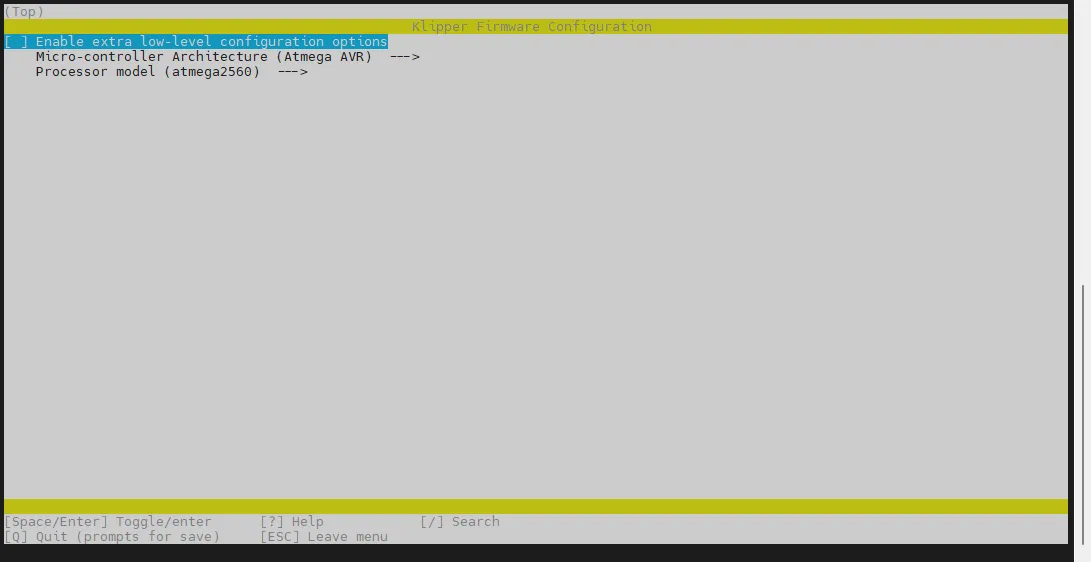
-
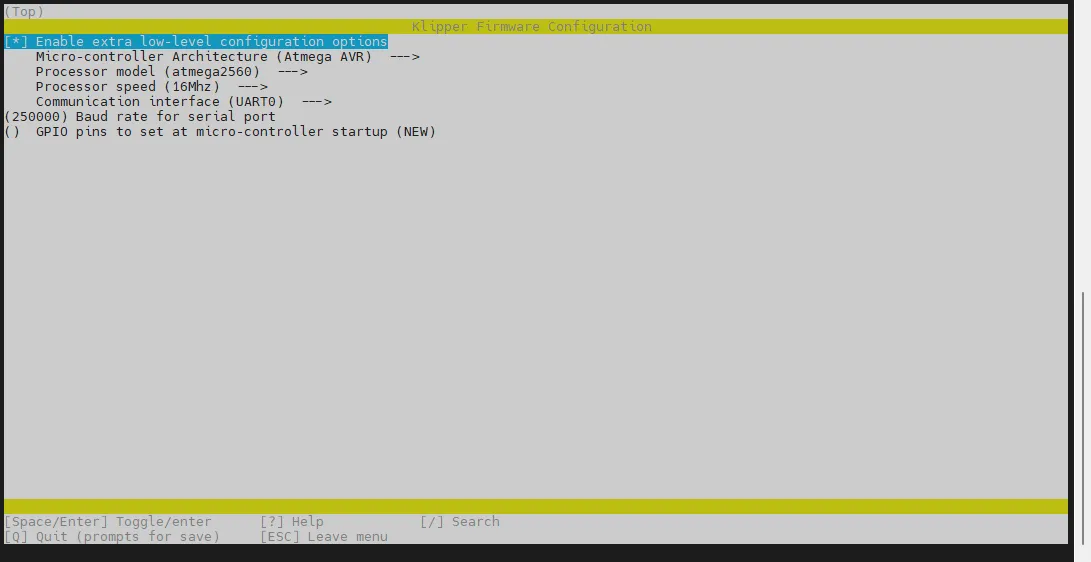
Выберите Enable extra low-level configuration options и нажмите Enter
-
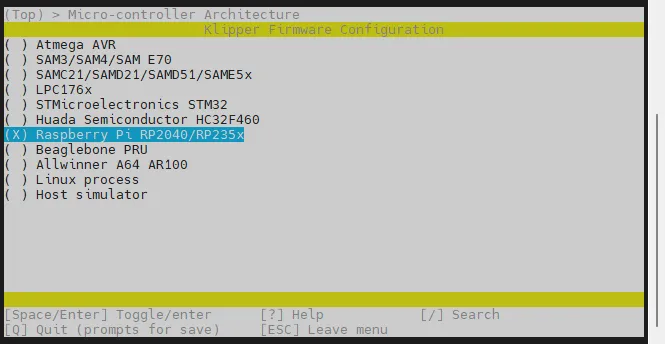
Перейдите в меню Micro-controller Architecture и выберите Raspberry Pi RP2040/RP235x, затем нажмите Enter
-
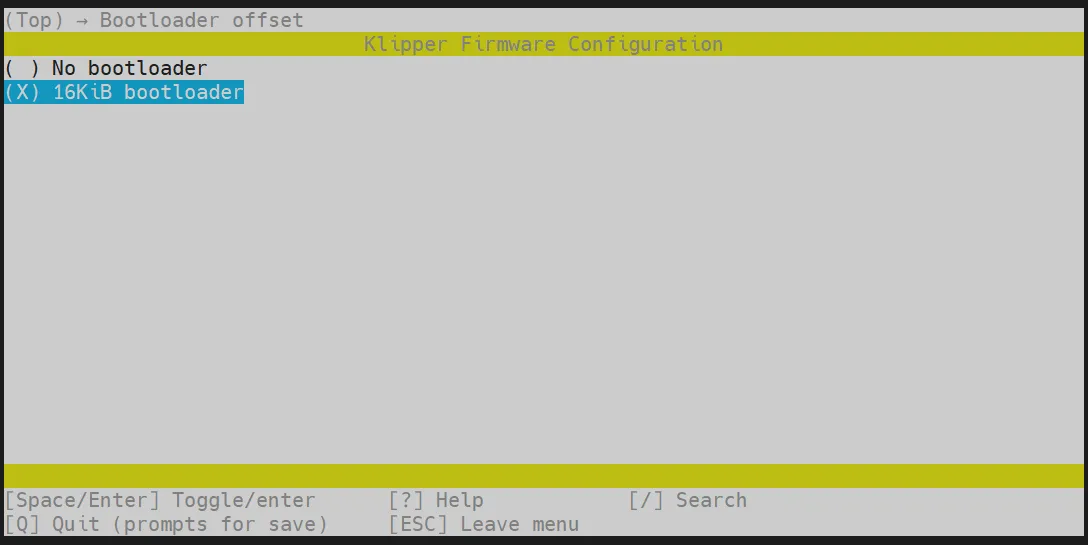
Выберите Bootloader offset, выберите: 16KiB bootloader
-
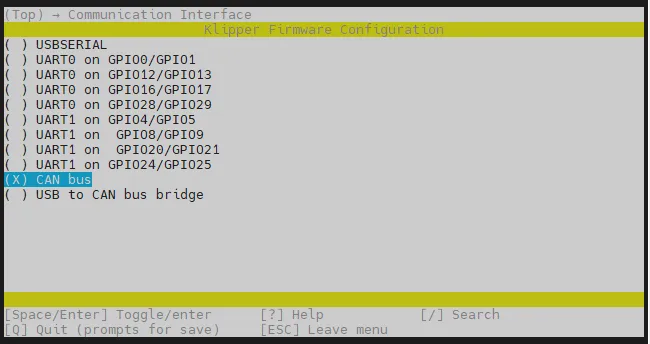
Выберите Communication interface, выберите: CAN bus
-
Выберите
(4) CAN RX gpio number, удалите4и введите1 -
Выберите
(5) CAN TX gpio number, удалите5и введите0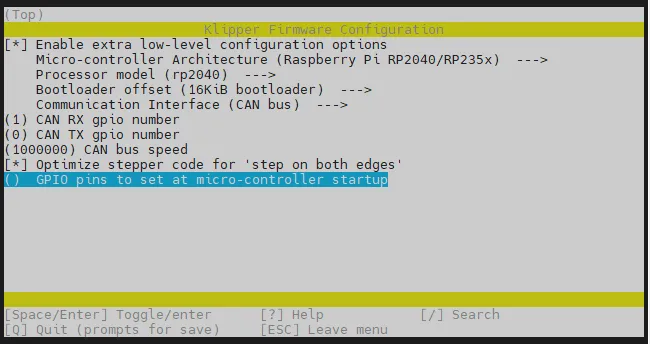
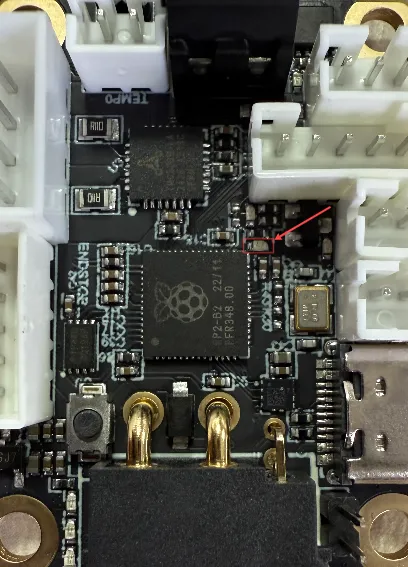
- Выберите GPIO pins для установки при старте микроконтроллера, введите: !gpio18
Пожалуйста, вводите в режиме английской раскладки клавиатуры !gpio18
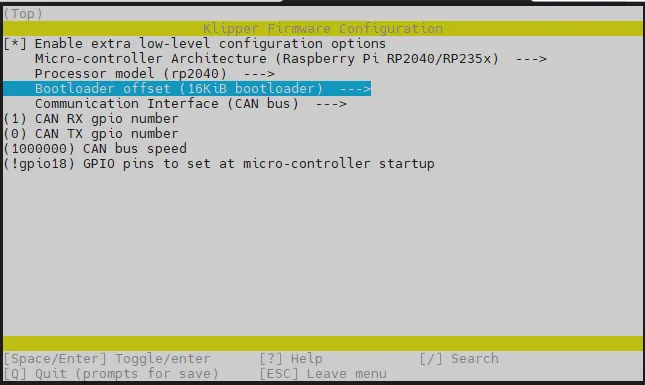
- Убедитесь, что все соответствует изображению выше, перед продолжением
- Нажмите клавишу
Q, появится Сохранить конфигурацию, затем нажмите клавишуY
- Теперь должна быть сохранена конфигурация и вы вернулись к командной строке
- Введите следующую команду для начала компиляции (время займет немного):
make -j4
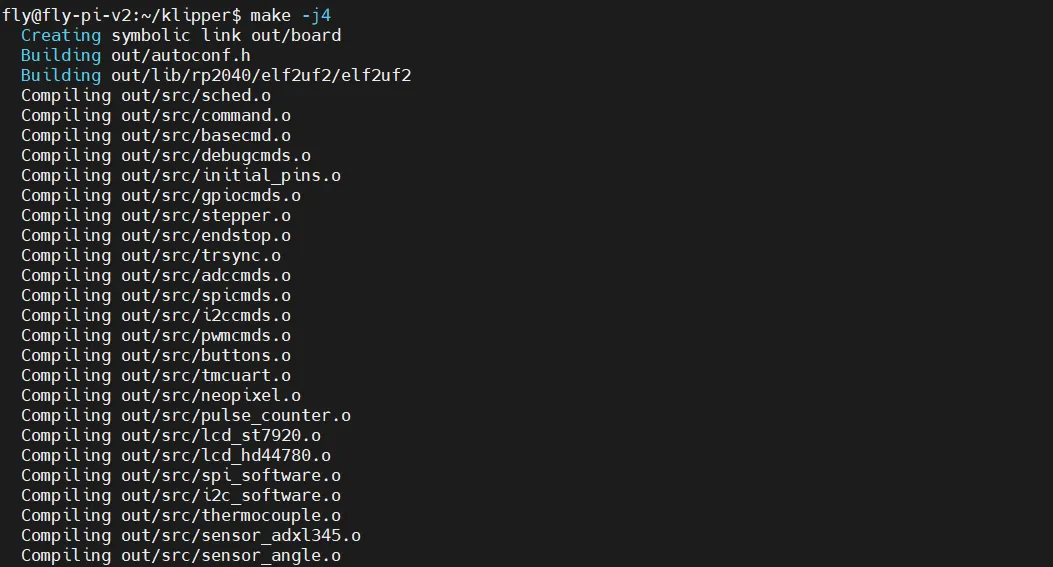
-
Если последний вывод содержит следующее, то компиляция успешно завершена:
Linking out/klipper.elf
Creating bin file out/klipper.bin
Настройка верхнего уровня
Если ваш верхний уровень является FLY, выполнение шагов настройки верхнего уровня не требуется.
Если ваш верхний уровень является не FLY, выполните следующие шаги.
Проверка поддержки CAN в верхнем уровне
- Для FLY верхнего уровня это действие не требуется
- Если ваша система —
Ubuntu, потребуется Конфигурация CAN0 для Ubuntu, данная документация пока не обновлена - Введите следующую команду для проверки поддержки CAN в ядре системы:
sudo modprobe can && echo "Ваше ядро поддерживает CAN" || echo "Ваше ядро не поддерживает CAN"
- После ввода команды, если ваше ядро поддерживает CAN, будет выведено:
Ваше ядро поддерживает CAN; если нет, будет выведено:Ваше ядро не поддерживает CAN.
Если результат — Ваше ядро поддерживает CAN, можно переходить к следующему шагу — настройке CAN0. Если результат — Ваше ядро не поддерживает CAN, пожалуйста, замените систему или устройство верхнего уровня!
Настройка CAN0
- Данная команда перезаписывает существующую конфигурацию CAN0 и требует перезагрузки системы после выполнения
- Пожалуйста, выберите одну из опций в зависимости от реальной ситуации (Klipper использует по умолчанию скорость CAN 1 Мбит/с, рекомендуется использовать скорость 1 Мбит/с)
Для скорости 1 Мбит/с введите следующую команду:
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 1000000
up ifconfig $IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 1000000
pre-up ip link set can0 txqueuelen 1024
EOF
Для скорости 500 Кбит/с введите следующую команду:
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 500000
up ifconfig $IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 500000
pre-up ip link set can0 txqueuelen 1024
EOF
- Перезагрузите устройство:
sudo reboot
Проверка режима записи
- Убедитесь, что верхний уровень может нормально подключаться к сети, и убедитесь, что соединительный кабель между нижним уровнем и верхним уровнем поддерживает передачу данных.
- Подключитесь через SSH к верхнему уровню и введите команду
lsusbи нажмите Enter. Если появляется информация, заключенная в круглые скобки на изображении ниже, можно переходить к следующему шагу.- Если никакой информации не возвращается, это проблема системы верхнего уровня, мы не можем помочь. Вам нужно заменить систему или устройство верхнего уровня.
- Если появляется сообщение о том, что команда
lsusbне найдена, выполните эту команду для установки:sudo apt-get install usbutils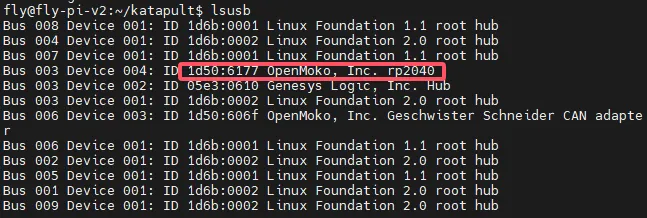
- Информация
OpenMoko, Inc. Geschwister Schneider CAN adapterимеет диагностическое значение.- Некоторые устройства верхнего уровня могут показывать недостаточно или вообще не показывать информацию из-за проблем с системой.
Запись прошивки
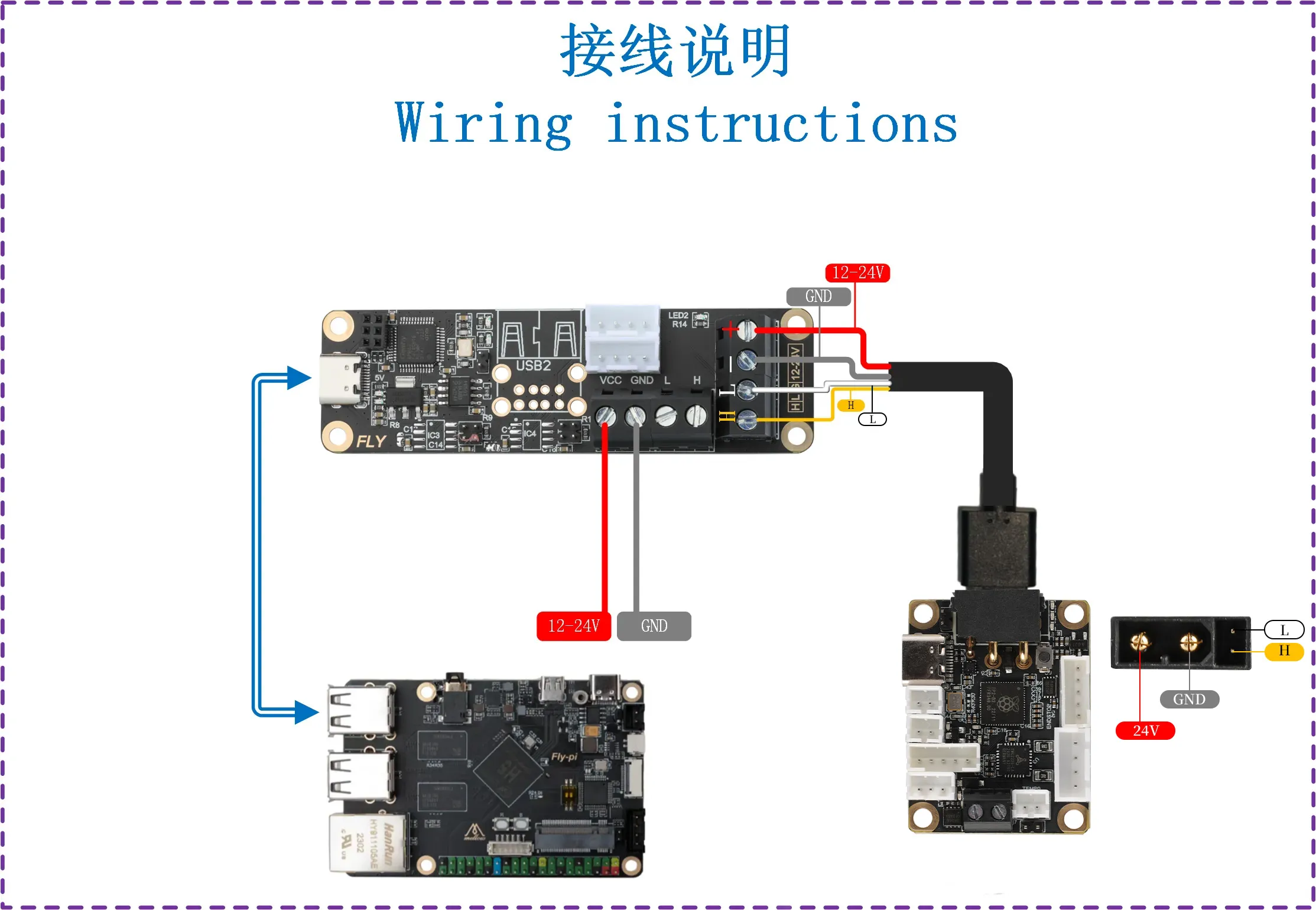
- Перед записью прошивки подключите инструментальную плату к UTOC или материнской плате с прошивкой моста через данные кабели XT30. Ниже приведена схема подключения:
- Убедитесь, что переключатели установлены правильно
Схема подключения интерфейса KF
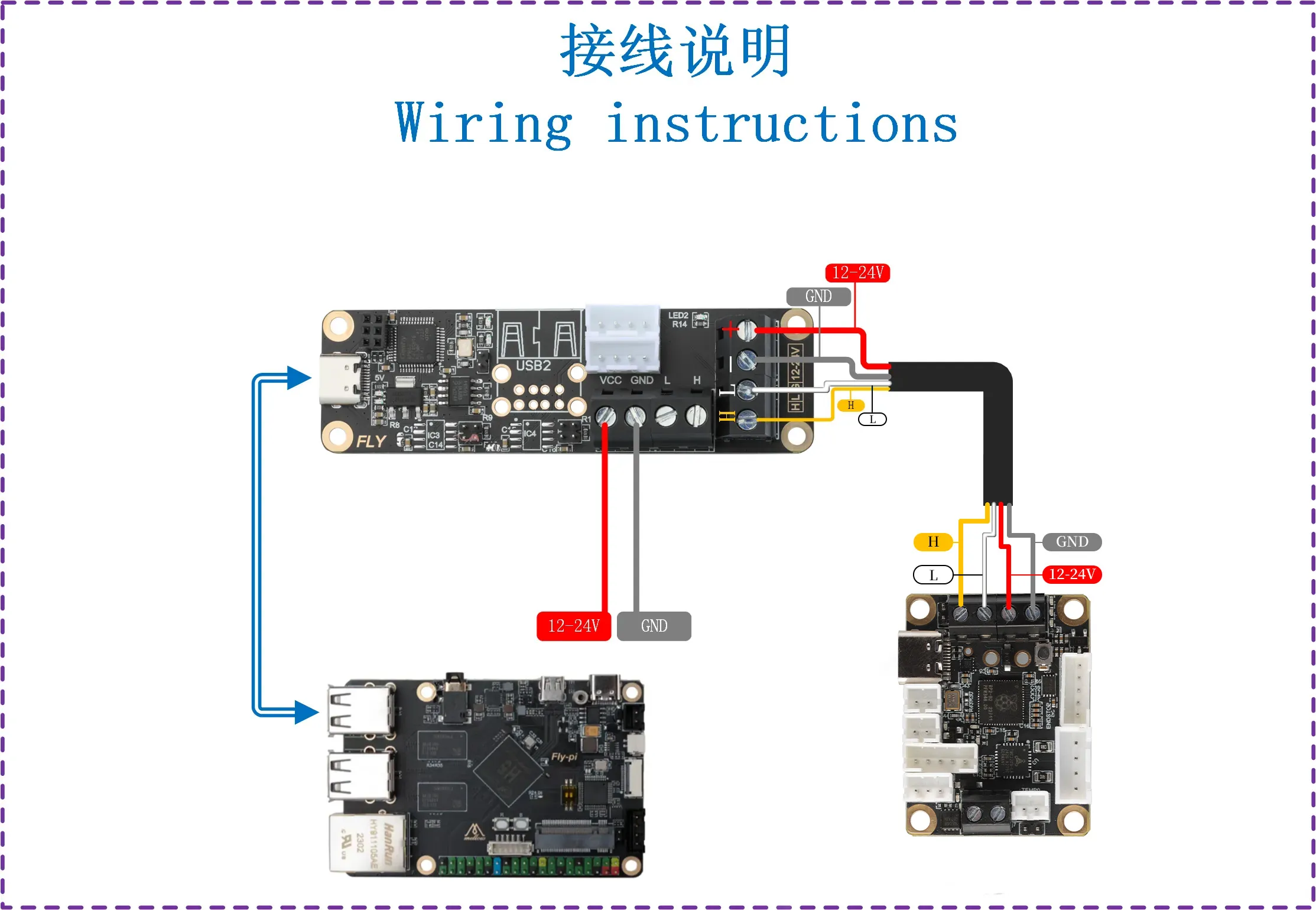
Схема подключения интерфейса XT30
- Убедитесь, что сопротивление между CAN H и CAN L измеряется вольтметром при выключенном питании и составляет около
60 Ом. Если сопротивление равно120 Ом, подключите переходник120 Ом. Если сопротивление около40 Ом, снимите переходник.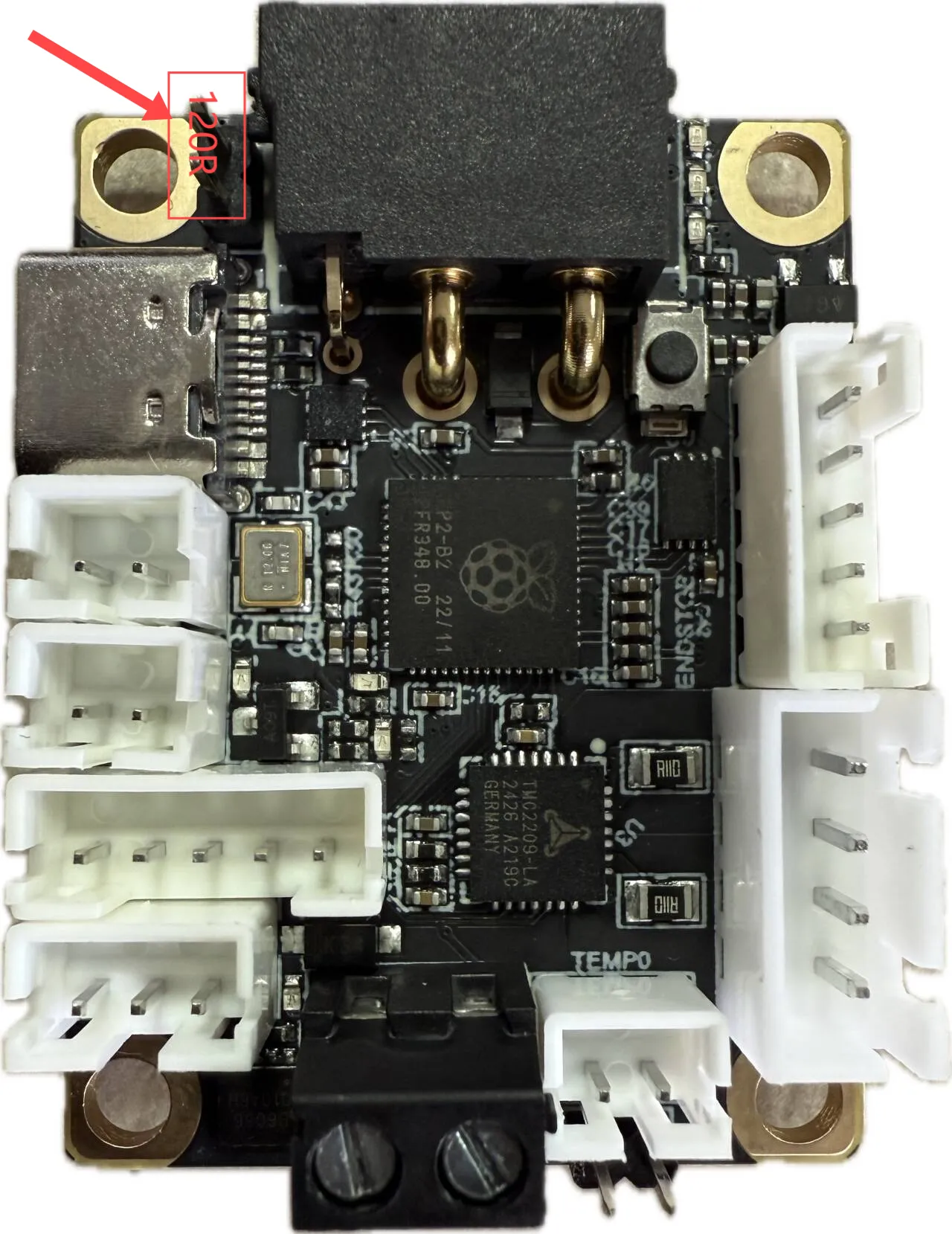
::::предупреждение
- Убедитесь, что сеть CAN на хост-компьютере уже настроена
- При наличии
1d50:606fпосле выполнения команды lsusb можно использовать команду ниже для поиска ID CAN - Скорость CAN на инструментальной плате должна совпадать с хост-компьютером, иначе ID не будет найден и запись невозможна
::::
-
Для запроса UUID канала CAN выполните следующую команду:
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0Для системы
fastиспользуйте эту команду для записи, замените<ваш ID материнской платы>на значение, полученное на предыдущем шагеpython ~/klipper/scripts/canbus_query.py can0-
После ввода вы увидите одно из следующих состояний (примеры ниже):
- Первый случай: материнская плата с прошивкой моста показывает один ID и выводит
Application: Klipper
- Второй случай: материнская плата с прошивкой моста вместе с инструментальной платой, которая требует прошивки, показывает два ID

- Третий случай: использование UTOC вместе с инструментальной платой, которая требует прошивки
- Примечание: UTOC не показывает ID

- Четвертый случай: отсутствие ID, обычно это вызвано占用 программой Klipper, неправильной скоростью CAN0 на хост-компьютере или неисправностью соединения

- Первый случай: материнская плата с прошивкой моста показывает один ID и выводит
-
Обычно инструментальная плата, находящаяся в состоянии CANBOOT, покажет
Application: CanBoot, и соответствующий светодиод будет мигать. В этом случае вам нужно записать прошивку Klipper, иначе подключение невозможно!!! -
Примечание: если установлен профиль Klipper и ID добавлен в конфигурацию, то ID не будет отображаться и будет занят программой Klipper, вам нужно временно отключить ID и полностью перезагрузить материнскую плату.
-
::::предупреждение
- Если UUID не найден, см. документацию ниже
- Сборник проблем CAN
::::
Запись прошивки
-
Замените следующую команду
<241696050c56>на найденный UUID, обратите внимание на пробел после-upython3 ~/klipper/lib/canboot/flash_can.py -u 241696050c56 -
Как показано на картинке ниже, при появлении
CAN Flash Successзапись прошла успешно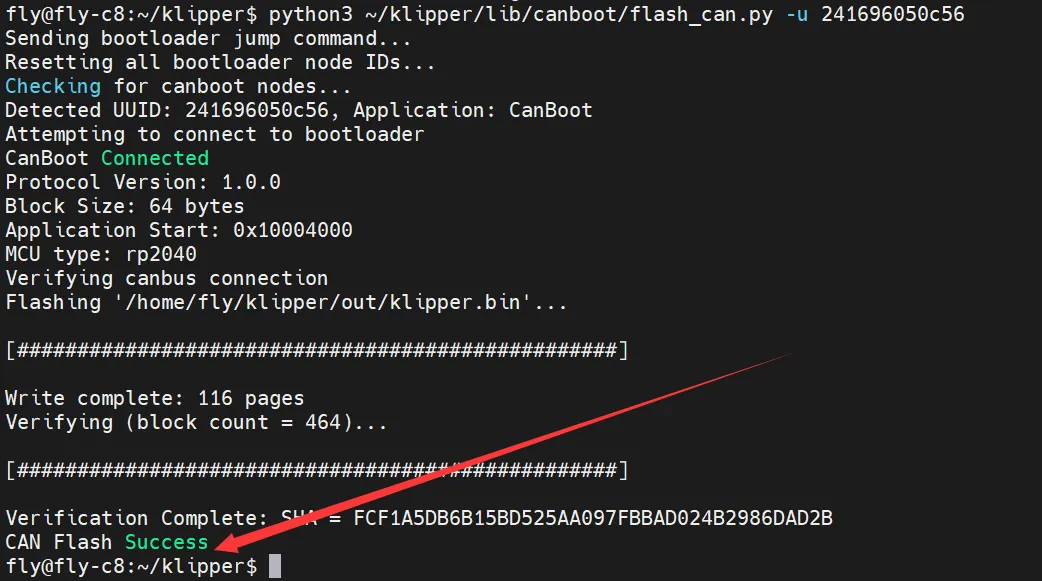
Обновление прошивки
- Для обновления прошивки достаточно скомпилировать новую версию и повторно выполнить команду записи
- Убедитесь, что можно найти соответствующий ID или Klipper уже подключен
python3 ~/klipper/lib/canboot/flash_can.py -u <MCU ID>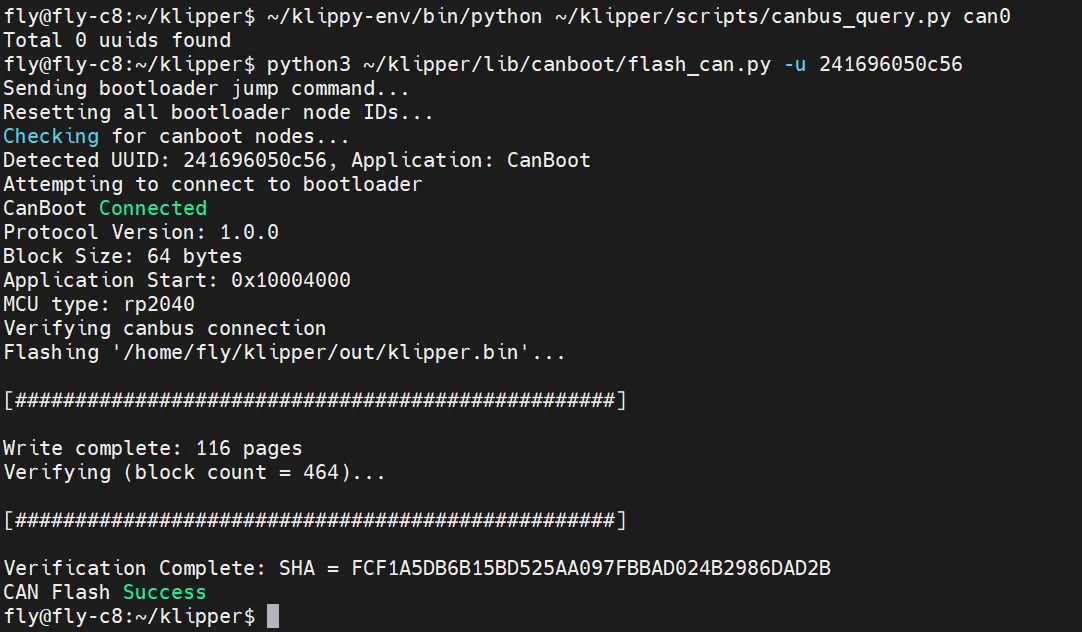
::::
Проверка запуска прошивки
- Если прошивка успешно запущена, светодиоды загорятся