CAN 펌웨어 컴파일
컴파일 시작
klipper서비스가 설치된 상위기기를 사용해야 합니다. 네트워크를 통해 SSH 연결하기- 그리고 장치를 상위기에 잘 연결해야 합니다.
- 주의: 일반적인 상위기기를 사용하십시오. 예를 들어 라즈베리 파이 FLY 패 등입니다. WiFi 스틱, 홍미폰 등의 모modified 상위기는 지원 문제가 많아 기술 지원을 제공할 수 없습니다.
ROOT사용자를 일반 사용자로 전환하려면 아래 명령어를 입력할 수 있습니다.ROOT사용자는 사용하지 마십시오.- fly 사용자는 다음을 입력할 수 있습니다:
su fly. fly 사용자가 아닌 경우<상위기기 사용자 이름>을 상위기기의 사용자 이름으로 바꾸십시오!
su <상위기기 사용자 이름>
- 상위기기(Up Host)가 정상적으로 네트워크에 연결되어 있는지 확인하세요.
- 펌웨어 컴파일 전에 SSH를 통해 상위기기에 네트워크로 로그인해야 합니다.
- 상위기기에 시리얼 포트(Serial Tool)를 사용하지 마세요.
Klipper 펌웨어 컴파일 및 구성 페이지 작동 설명
키보드 입력 모드를 반각(Half-width) 모드로 설정해 주세요. 즉, 영문 모드입니다.
- 키보드의
↑(위쪽 화살표),↓(아래쪽 화살표)는 메뉴 항목을 선택하기 위해 커서를 위아래로 이동시킵니다. - 확인 키
Enter또는 공백 키Space는 메뉴를 선택하거나 하위 메뉴로 진입합니다. - 종료 키
ESC는 상위 메뉴로 돌아갑니다. Q키는 Klipper 펌웨어 구성 페이지를 종료합니다.- Klipper 펌웨어 구성 페이지를 종료할 때
Y키를 눌러 구성 파일을 저장할 수 있습니다.
구성 페이지 옵션이 적을 경우, Enable extra low-level configuration options 항목을 선택([ ])하여 일부 숨겨진 옵션을 표시할 수 있습니다.
아래는 펌웨어를 컴파일하는 방법을 소개합니다:
-
SSH에 연결한 후 아래 명령어를 입력하고 Enter를 누릅니다:
cd ~/klipper && rm -rf ~/klipper/.config && rm -rf ~/klipper/out && make menuconfig -
그 중
rm -rf ~/klipper/.config && rm -rf ~/klipper/out는 이전의 컴파일 데이터와 펌웨어를 삭제하고make menuconfig는 펌웨어를 컴파일하며, 실행하면 아래와 같은 화면이 나타납니다: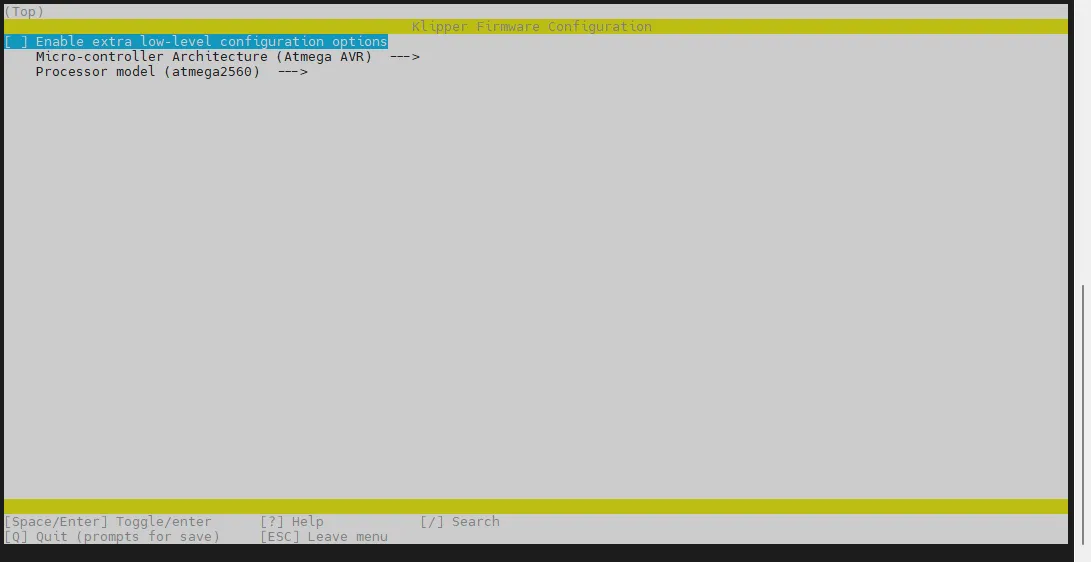
-
Enable extra low-level configuration options를 선택하고 Enter를 누릅니다.
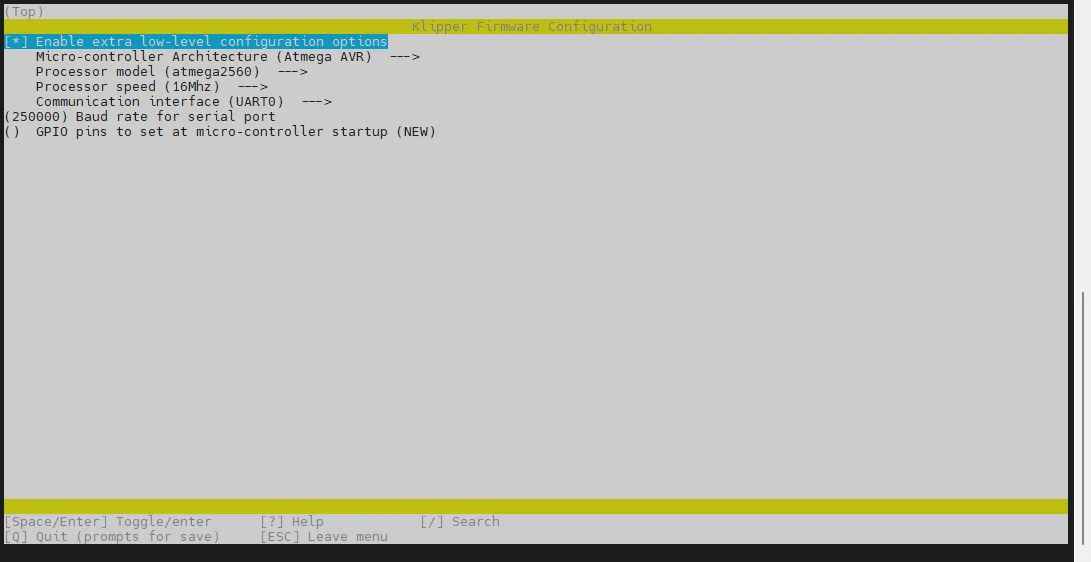
-
Micro-controller Architecture 메뉴로 들어가 Raspberry Pi RP2040/RP235x를 선택하고 Enter를 누릅니다.
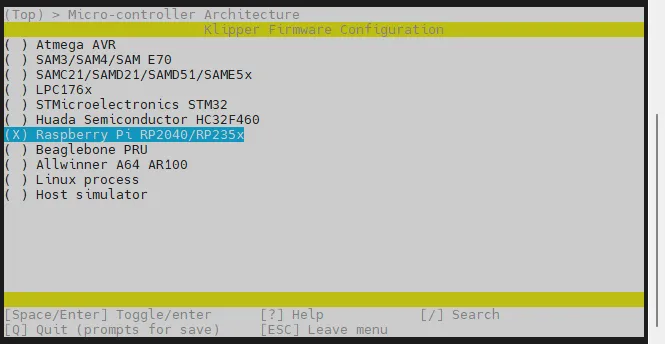
-
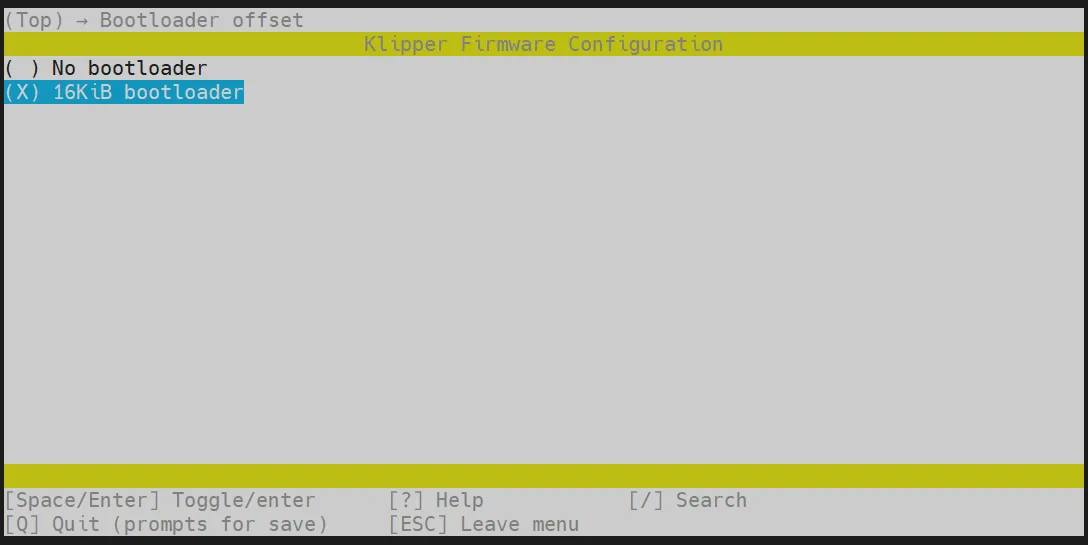
Bootloader offset를 선택하고: 16KiB bootloader를 선택합니다.
-
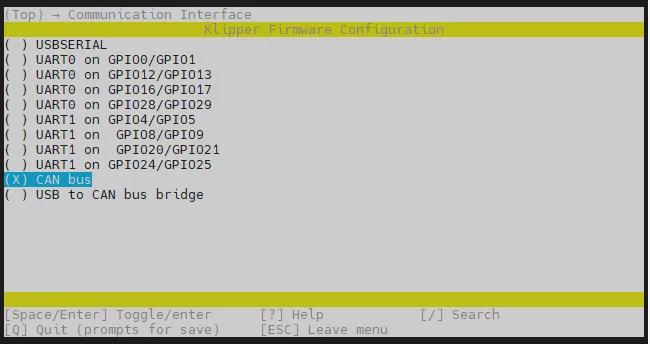
Communication interface를 선택하고: CAN bus를 선택합니다.
-
(4) CAN RX gpio number를 선택하고4를 삭제한 뒤1을 입력합니다. -
(5) CAN TX gpio number를 선택하고5를 삭제한 뒤0을 입력합니다.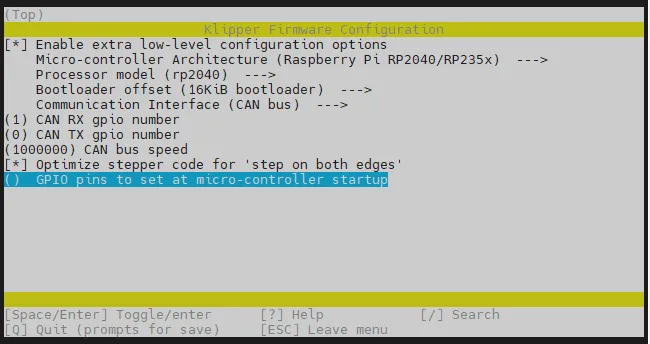
- 마이크로컨트롤러 시작 시 설정할 GPIO 핀 선택을 선택하고, 다음을 입력하세요: !gpio18
!gpio18을 입력할 때는 영문 입력 모드여야 합니다.
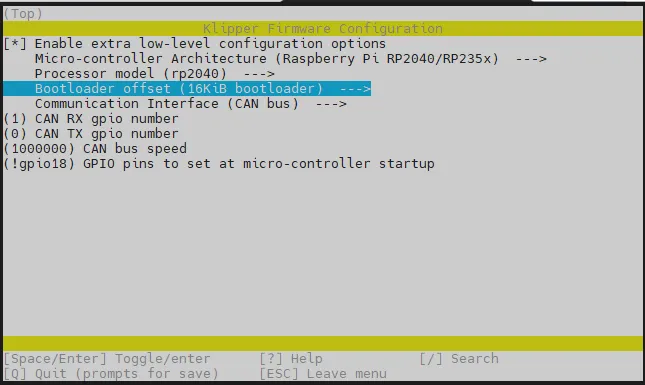
- 위 그림과 비교하여 동일한지 확인한 후 다음 단계로 진행하십시오.
Q키를 누르면 설정 저장이 나타나며, 이때Y키를 누릅니다.
- 이제 설정을 저장하고 명령줄 인터페이스로 나가게 됩니다.
- 아래 명령어를 입력하여 컴파일을 시작합니다. 시간이 조금 걸립니다.
make -j4
-
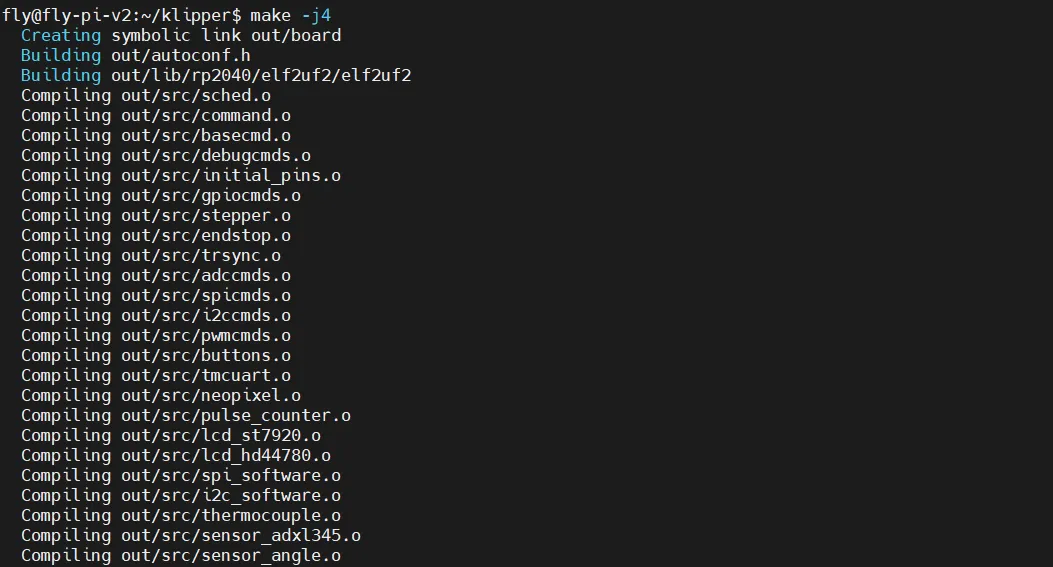
마지막으로 다음 내용이 출력되면 컴파일이 성공적으로 완료되었습니다.
Linking out/klipper.elf
Creating bin file out/klipper.bin
호스트 컴퓨터 구성
호스트 컴퓨터가 FLY 호스트인 경우, 이 단계는 수행할 필요가 없습니다.
호스트 컴퓨터가 FLY가 아닌 경우, 다음 단계를 수행해야 합니다.
호스트 컴퓨터가 CAN을 지원하는지 확인
- FLY 호스트 컴퓨터인 경우 이 작업은 수행할 필요가 없습니다.
- 운영 체제가
Ubuntu인 경우Ubuntu에서 CAN0 구성이 필요하며, 이 문서는 업데이트되지 않았습니다. - 다음 명령어를 입력하여 시스템이 CAN을 지원하는지 확인하십시오.
sudo modprobe can && echo "당신의 커널은 CAN을 지원합니다." || echo "당신의 커널은 CAN을 지원하지 않습니다."
- 위 명령어를 입력한 후, 커널이 CAN을 지원하면
당신의 커널은 CAN을 지원합니다.가 반환되고, 지원하지 않으면당신의 커널은 CAN을 지원하지 않습니다.가 반환됩니다.
당신의 커널은 CAN을 지원합니다.가 반환되면 다음 단계에서 CAN0를 구성할 수 있습니다. 당신의 커널은 CAN을 지원하지 않습니다.가 반환되면 호스트 컴퓨터 시스템을 변경하거나 호스트 컴퓨터를 교체해야 합니다!
CAN0 구성
- 이 명령어는 기존 시스템의 CAN0 설정을 덮어씁니다. 실행한 후 시스템을 재시작해야 합니다.
- 실제 상황에 따라 다음 중 하나를 선택하십시오 (Klipper 기본 CAN 속도는 1M이므로 1M 속도를 권장합니다).
1M 속도를 사용하려면 다음 명령어를 입력하십시오.
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 1000000
up ifconfig $IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 1000000
pre-up ip link set can0 txqueuelen 1024
EOF
500K 속도를 사용하려면 다음 명령어를 입력하십시오.
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 500000
up ifconfig $IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 500000
pre-up ip link set can0 txqueuelen 1024
EOF
- 장치를 재시작하십시오.
sudo reboot
프로그래밍 모드 진입 여부 확인
- 호스트 컴퓨터가 정상적으로 네트워크에 연결되어 있고, 하위 장치가 호스트 컴퓨터의 데이터선을 통해 데이터 전송 기능을 가지고 있는지 확인하십시오.
- SSH로 호스트 컴퓨터에 연결한 후
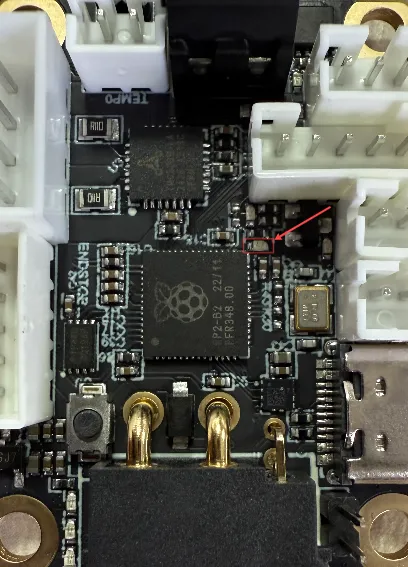
lsusb를 입력하고 엔터를 누르세요. 만약 아래 이미지에서 둥근 부분처럼 정보가 나타나면 다음 단계로 진행할 수 있습니다.- 아무런 정보가 없으면 호스트 컴퓨터의 시스템 문제입니다. 여기서는 도와드릴 수 없으므로 정상적인 시스템이나 호스트 컴퓨터를 교체해야 합니다.
lsusb명령어가 없다면 다음 명령어를 실행하여 설치할 수 있습니다sudo apt-get install usbutils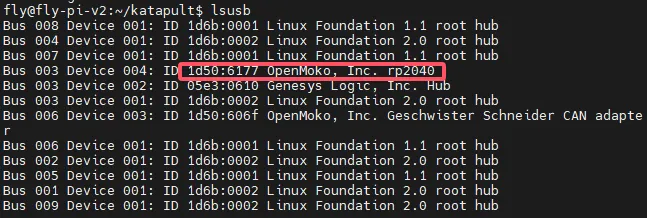
OpenMoko, Inc. Geschwister Schneider CAN adapter뒷부분은 판단 근거가 됩니다.- 일부 호스트 컴퓨터는 시스템 문제로 인해 정보가 부족하거나 표시되지 않을 수 있습니다.
펌웨어 프로그래밍
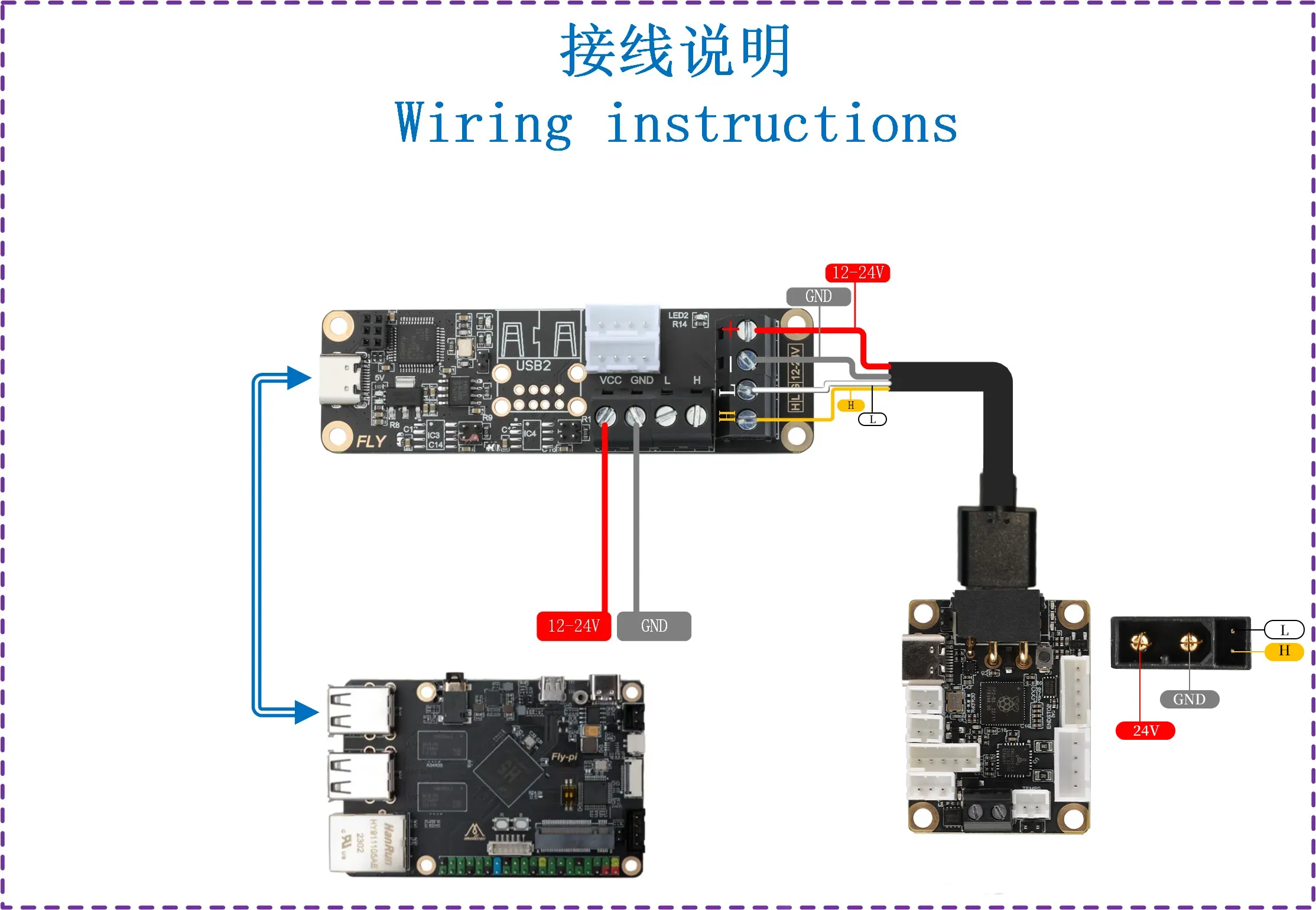
- 펌웨어 프로그래밍 전에 XT30 데이터선을 사용하여 툴보드를 UTOC 또는 브리지 펌웨어가 설치된 메인보드에 연결하십시오. 아래는 참고용 배선도입니다.
- 스위치가 올바른 위치로 설정되어 있는지 확인하십시오.
KF 인터페이스의 다이어그램
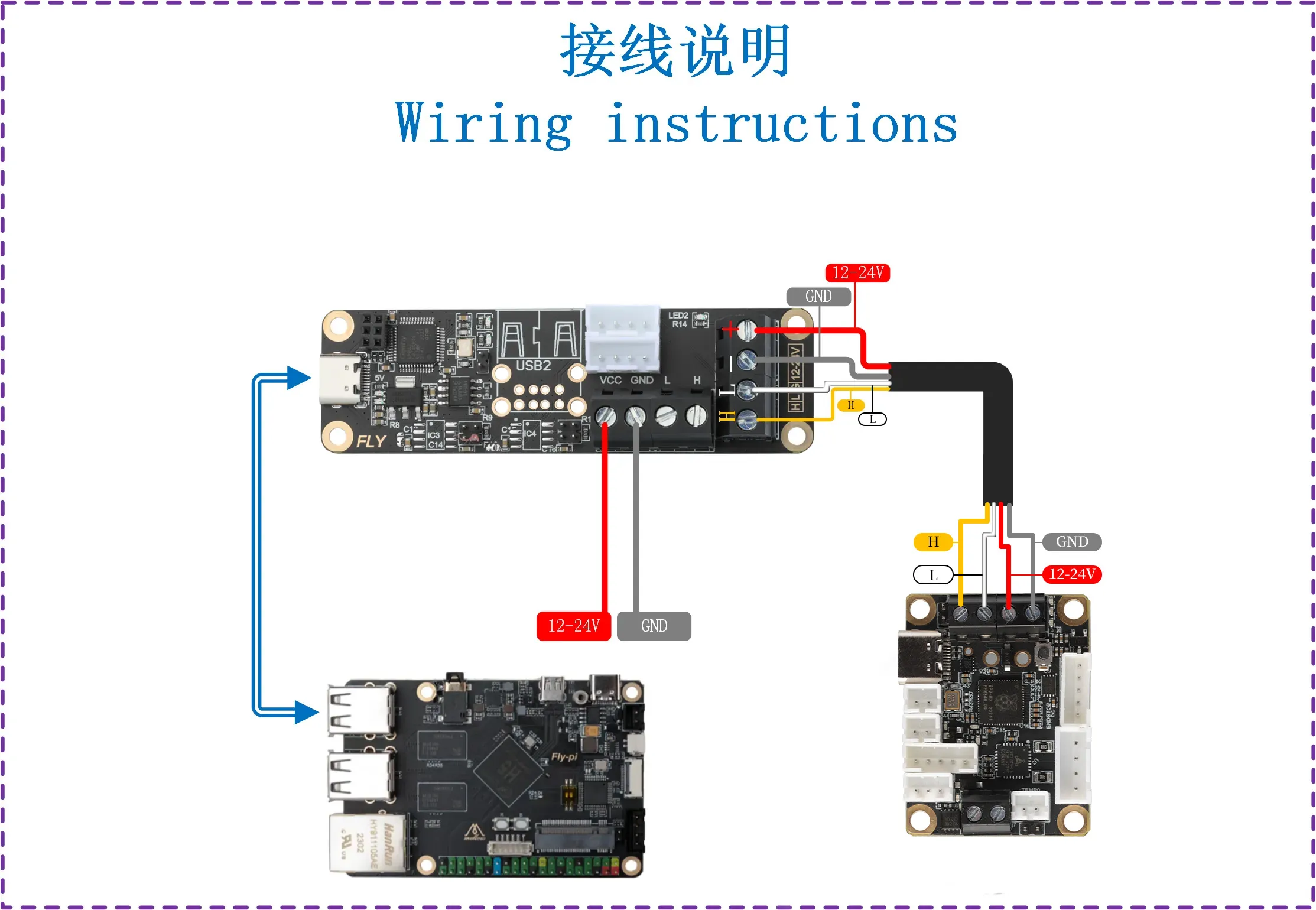
XT30 인터페이스 다이어그램
- 전원이 꺼진 상태에서 CAN H와 CAN L을 멀티미터로 측정하여 약
60Ω인지 확인하십시오.120Ω라면120Ω점자선을 연결해야 하며,40Ω정도라면 점자선을 제거해야 합니다.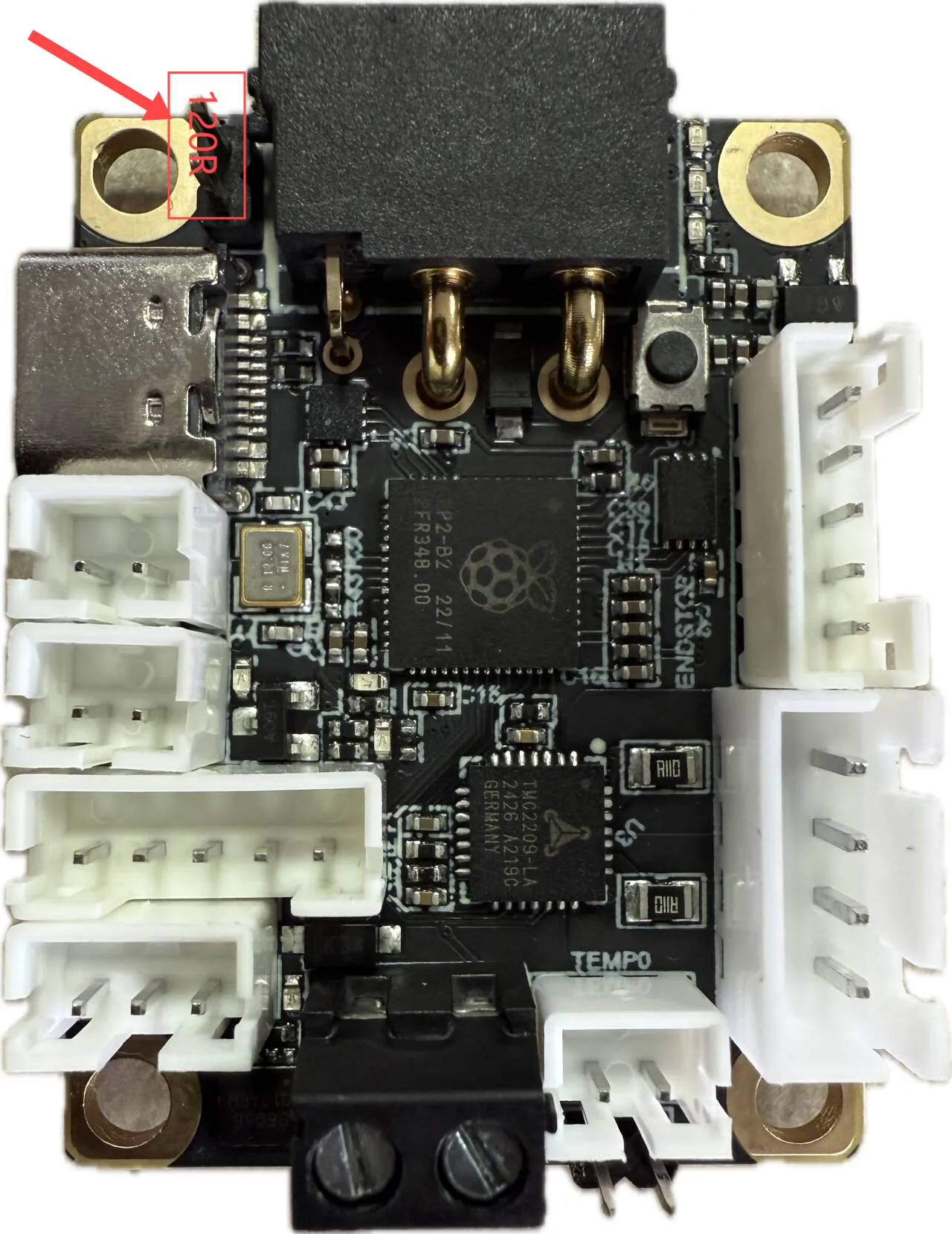
::: 팁
- ID 찾기 및 펌웨어 갱신은 모두 프린팅 중에 하지 않는 것이 좋습니다.
- 동일한 메인보드 또는 Katapult 도구 보드의 CAN 펌웨어와 Klipper의 CAN 펌웨어는 그들의 ID가 완전히 일치합니다.
:::
::: 주의
- 호스트 컴퓨터의 CAN 네트워크가 구성되었는지 확인하시기 바랍니다.
lsusb명령 후에1d50:606f가 나타날 경우만 아래 명령어를 사용하여 CAN ID를 검색할 수 있습니다.- 도구 보드의 CAN 속도가 호스트 컴퓨터와 같지 않으면 ID를 찾을 수 없으며, 펌웨어 갱신이 실패할 수 있습니다.
:::
-
CANBus UUID를 조회하기 위해 다음 명령어를 실행하세요:
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0fast시스템에서는 이 명령어를 사용하여 펌웨어를 갱신하십시오.<your mainboard ID>를 이전 단계에서 조회된 ID로 대체하십시오.python ~/klipper/scripts/canbus_query.py can0-
명령을 입력하면 기기에 따라 다음과 같은 몇 가지 경우가 나타납니다:
- 첫 번째 경우: 브리지 펌웨어가 설치된 메인보드에서 한 개의 ID가 표시되고 "Application: Klipper"라는 메시지가 나타납니다.

- 두 번째 경우: 브리지 펌웨어가 설치된 메인보드와 함께 펌웨어를 갱신해야 하는 도구 보드가 연결된 경우 두 개의 ID가 표시됩니다.

- 세 번째 경우: UTOC와 함께 펌웨어를 갱신해야 하는 도구 보드를 사용하는 경우
- 팁: UTOC는 ID가 표시되지 않습니다.

- 네 번째 경우: ID가 표시되지 않으며 일반적으로 Klipper에 의해 점유된 경우입니다. 상위 컴퓨터의 CAN0 속도가 올바르지 않거나 배선 문제가 있을 수 있습니다.

- 첫 번째 경우: 브리지 펌웨어가 설치된 메인보드에서 한 개의 ID가 표시되고 "Application: Klipper"라는 메시지가 나타납니다.
-
일반적으로 펌웨어를 갱신해야 하는 도구 보드가 CANBOOT 상태일 경우 "Application: CanBoot"라는 메시지와 함께 해당 펌웨어 LED가 깜박거립니다. 이 경우 Klipper 펌웨어를 갱신해야만 연결할 수 있습니다!!!
-
팁: Klipper 펌웨어를 사용하고 이미 ID를 설정한 경우, ID는 표시되지 않으며 Klipper에 의해 점유됩니다. 이 경우 해당 ID를 비활성화하고 메인보드를 완전히 전원을 끈 후 다시 시작해야 합니다.
::: 주의
- UUID를 찾지 못한 경우 아래 문서를 참조하세요
- CAN 문제 집합
:::
-
펌웨어 갱신
-
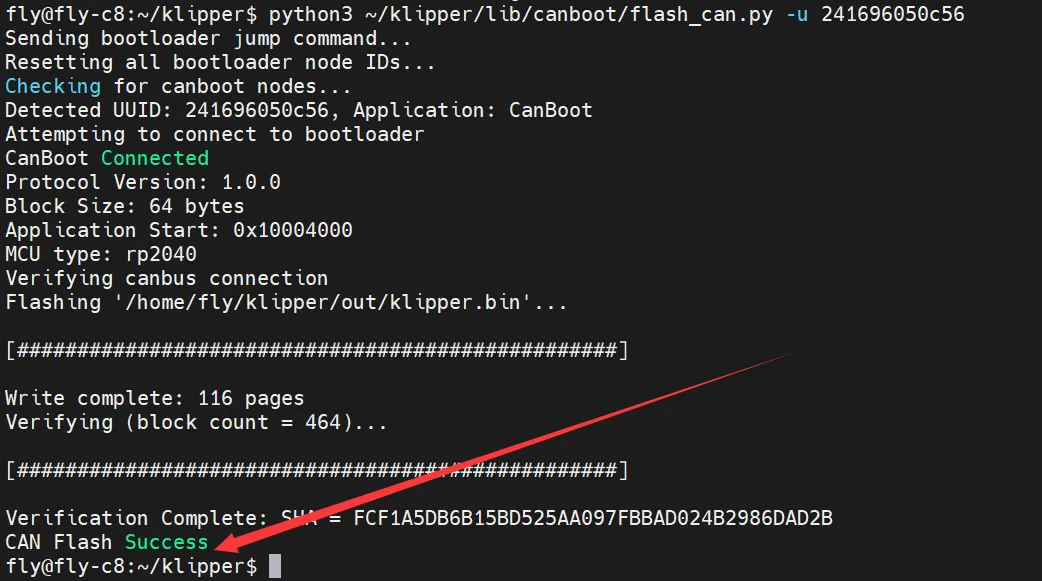
아래 명령어에서
241696050c56를 UUID를 찾은 UUID로 대체하십시오.-u뒤에는 공백이 있습니다.python3 ~/klipper/lib/canboot/flash_can.py -u 241696050c56 -
아래 그림과 같이 "CAN Flash Success"라는 메시지가 나타나면 성공적으로 갱신되었습니다.
펌웨어 업데이트
- 펌웨어를 갱신하려면 컴파일된 펌웨어를 다시 실행하여 갱신하면 됩니다.
- 그러나 대응되는 ID를 찾을 수 있거나 Klipper가 연결되어 있는지 반드시 확인하십시오.
python3 ~/klipper/lib/canboot/flash_can.py -u <MCU ID>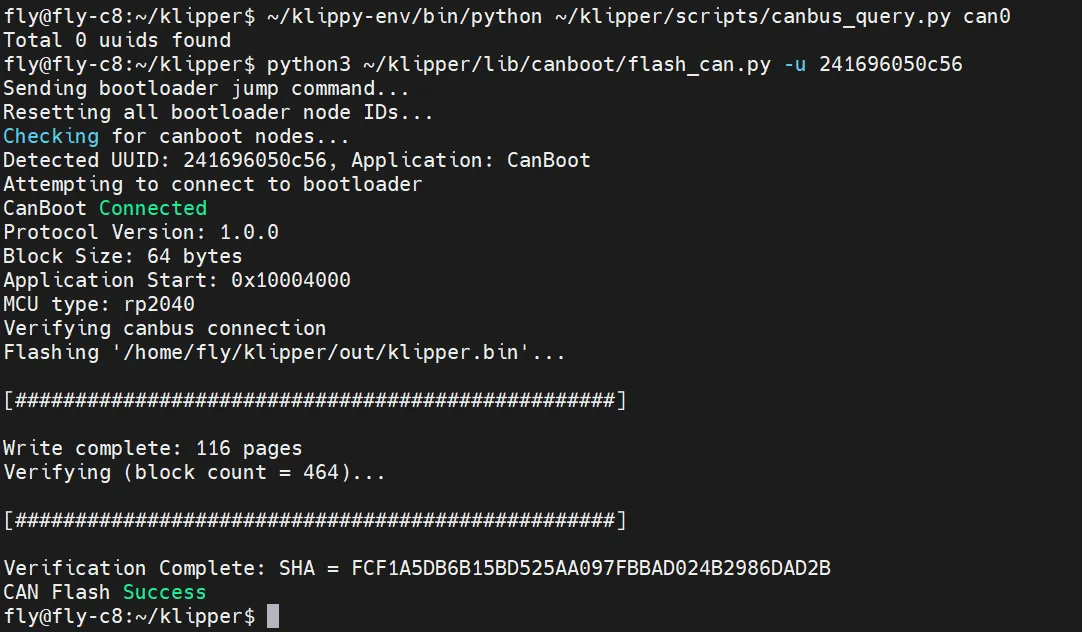
펌웨어가 시작되었는지 확인
- 펌웨어가 정상적으로 시작되면 LED가 켜집니다.