- Убедитесь, что ПК может нормально подключаться к сети
- Перед компиляцией прошивки необходимо подключиться к ПК через SSH по сети
- Не используйте инструменты терминала через последовательный порт для подключения к ПК
Компиляция прошивки Katapult
Начало компиляции
-
Требуется ПК с установленным и запущенным сервисом
klipperПодключение через SSH по сети -
Убедитесь, что устройство правильно подключено к ПК
-
Важно: используйте обычный ПК, например, Raspberry Pi или FLY-пай. Если вы используете модифицированный ПК (например, Wi-Fi адаптер, Redmi и т.д.), то из-за большого количества проблем мы не сможем предоставить вам техническую поддержку
заметка -
Для переключения с пользователя ROOT на обычного пользователя введите следующую команду
-
Не используйте пользователя ROOT
-
Для пользователя fly просто введите:
su fly. Для других пользователей замените<ваше имя пользователя>на имя пользователя вашего ПК!
su <имя пользователя вашего ПК>
:::
Описание операций компиляции и настройки прошивки Katapult
Убедитесь, что режим ввода клавиш находится в полуширинном режиме, то есть в английском режиме
- Клавиша вверх
↑, клавиша вниз↓— используются для перемещения курсора вверх или вниз для выбора пунктов меню - Клавиша подтверждения
Enterили пробелSpace— используется для выбора пункта меню или входа в подменю - Клавиша выхода
ESC— используется для возврата на предыдущее меню - Клавиша
Q— используется для выхода из страницы настроек прошивки Katapult - Клавиша
Y— при выходе из страницы настроек прошивки Katapult с подсказкой, нажмите клавишуY, чтобы сохранить файл конфигурации
Далее介绍一下, как скомпилировать прошивку:
-
Подключившись через SSH, введите следующую команду и нажмите Enter:
cd ~/katapult && rm -rf ~/katapult/.config && rm -rf ~/katapult/out && make menuconfig -
Где
rm -rf ~/katapult/.config && rm -rf ~/katapult/out— это удаление предыдущих данных компиляции и прошивки,make menuconfig— команда для компиляции прошивки, после выполнения должна появиться следующая интерфейсная картинка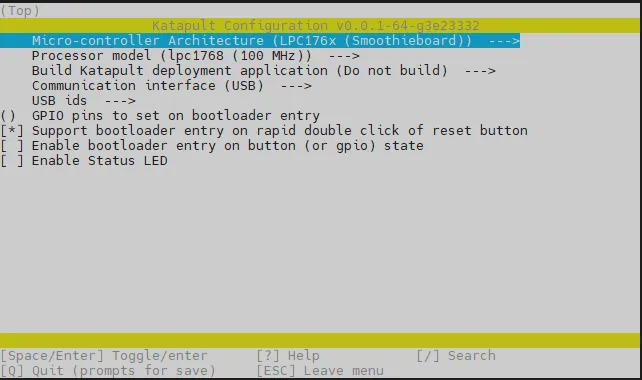
-
Выберите
Micro-controller Architecture (LPC176x (Smoothieboard))и нажмите Enter -
Войдите в меню, затем выберите Raspberry Pi RP2040 и нажмите Enter

-
Выберите
Build Katapult deployment application (Do not build), выберите: Do not build
-
Выберите Communication interface, выберите: CAN bus
-
Выберите
(4) CAN RX gpio number, удалите4и введите1 -
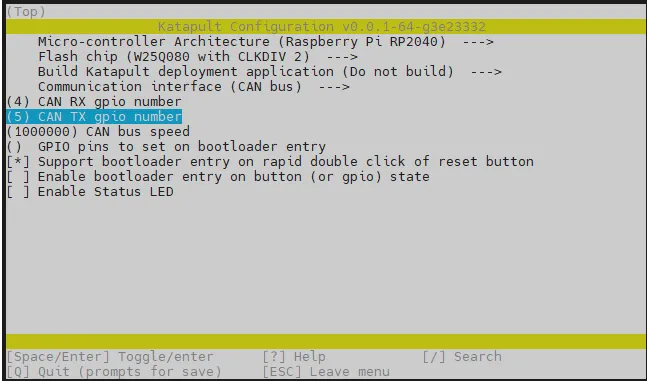
Выберите
(5) CAN TX gpio number, удалите5и введите0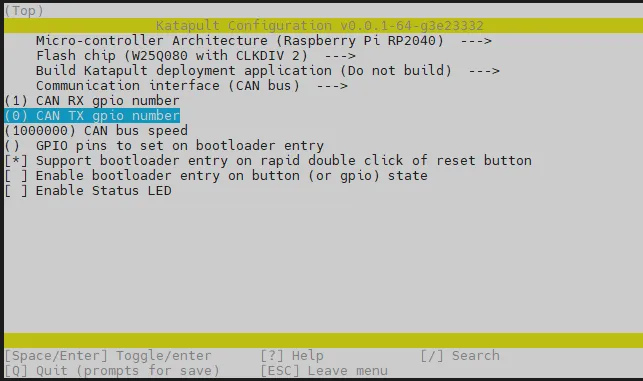
-
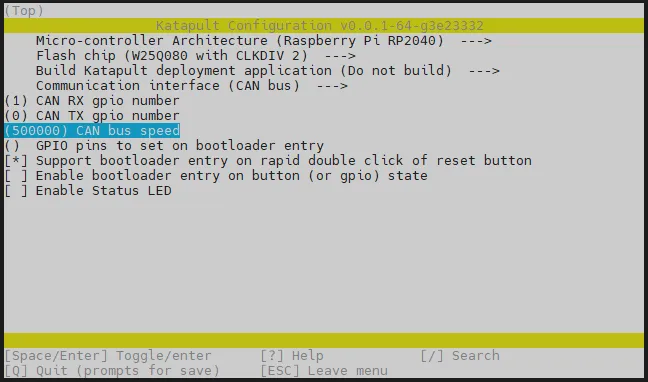
Скорость шины CAN по умолчанию составляет 1000000, если требуется изменить на 500000
-
Это для 1М
-
Это для 5к
-
Выберите Enable Status LED и нажмите Enter, выберите
Status LED GPIO Pin (NEW)и введите: !gpio18
Введите !gpio18 в английском режиме
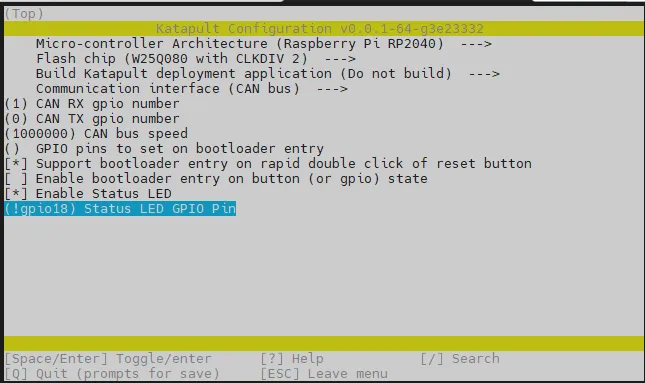
- Проверьте вышеизображенный рисунок, убедитесь, что все соответствует изображению, прежде чем продолжить
- Нажмите клавишу
Q, появится запрос Save configuration, затем нажмитеY
- Теперь должны быть сохранены настройки и вы вышли в командную строку
- Введите
make -j4для начала компиляции, процесс займет некоторое время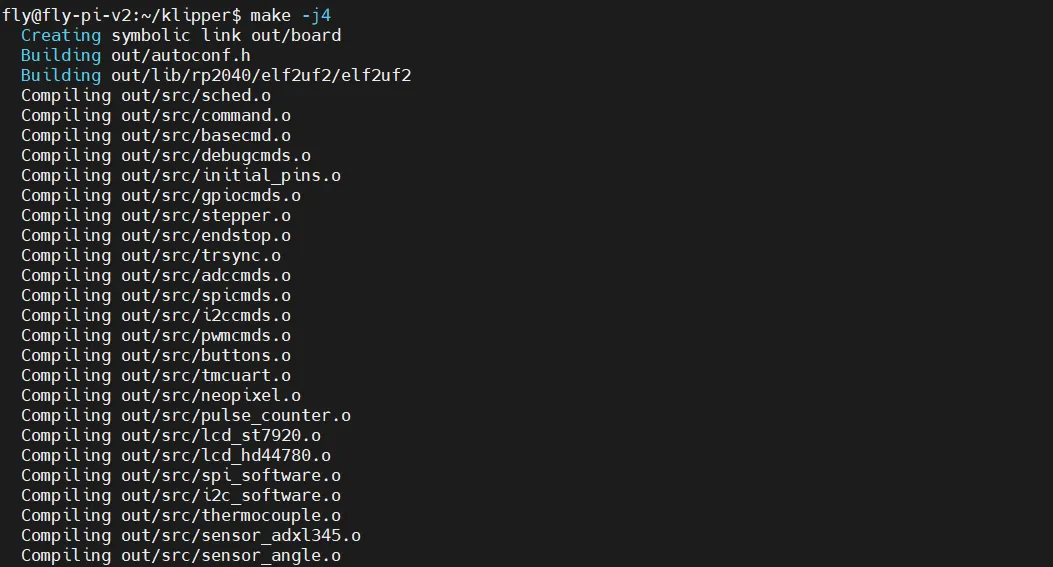
- Если выводится следующее содержимое, то компиляция успешно завершена
Linking out/katapult.elf
Creating bin file out/katapult.bin
Creating legacy binary out/canboot.bin
Building out/lib/rp2040/elf2uf2/elf2uf2
Creating uf2 file out/katapult.uf2
Creating legacy uf2 file out/canboot.uf2
Compiling out/src/deployer.o
Compiling out/src/generic/armcm_boot.o
Compiling out/src/generic/armcm_reset.o
Building out/deployer_ctr.o
Compiling out/katapult_payload.o
Preprocessing out/src/generic/armcm_deployer.ld
Linking out/deployer.elf
Creating hex file out/deployer.bin
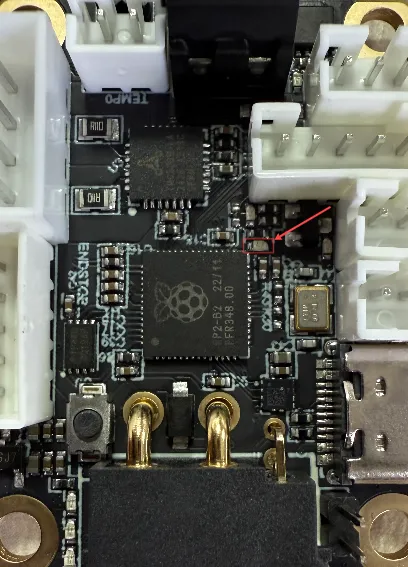
Переход в режим загрузки
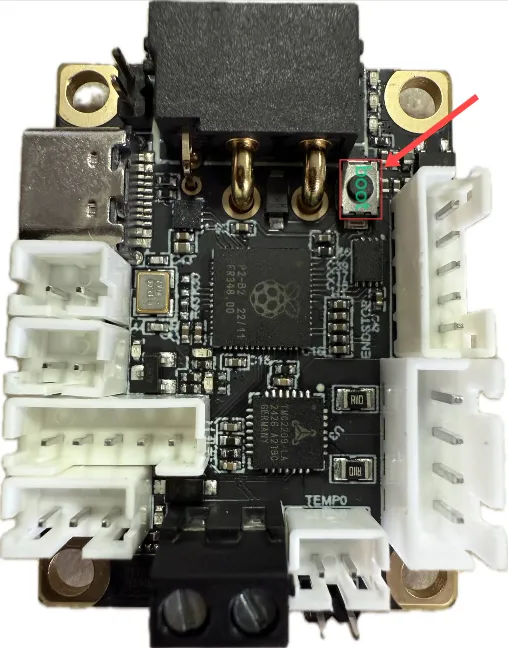
Стрелка указывает на кнопку BOOT
- Отключите питание платы, зажмите кнопку BOOT, а затем подключите кабель передачи данных с одной стороны к материнской плате, а с другой стороны к вашему устройству
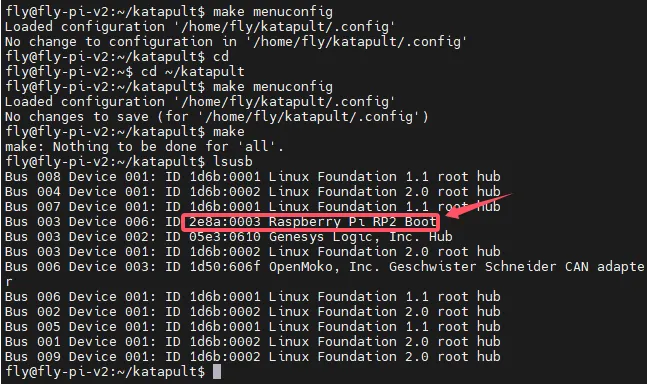
- Затем введите команду
lsusb
lsusb
- Появление изображения ниже означает, что система перешла в режим загрузки
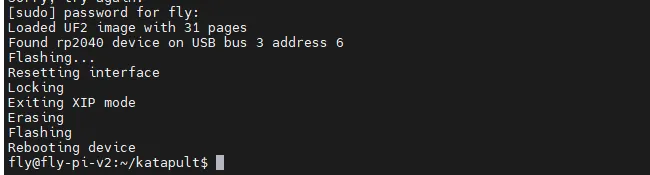
- Введите следующую команду для записи прошивки и нажмите Enter
make flash FLASH_DEVICE=2e8a:0003
Ввод команды mellow не будет отображаться
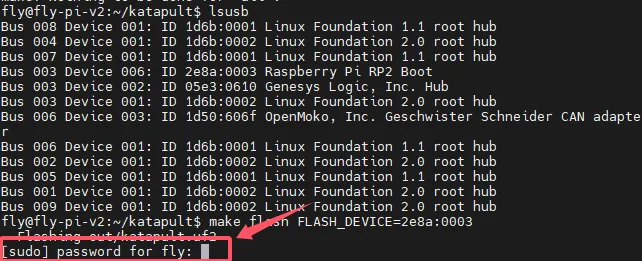
-
Если появится изображение ниже, введите
mellow, после чего просто нажмите Enter -
Если появилось сообщение, как показано на изображении ниже, то поздравляем, прошивка успешно завершена
Проверка запуска прошивки
- Если прошивка успешно запущена, светодиод начнет мигать
- Для поиска ID CAN введите команду и нажмите Enter
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
- Если команда выше не найдет ID, попробуйте ввести следующую команду
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can1
После ввода появится изображение с ID, указанный ID является справочным значением и не может использоваться
