- 호스트 머신이 정상적으로 인터넷에 연결되어 있는지 확인하세요.
- 펌웨어를 컴파일하기 전에 SSH를 통해 네트워크를 통해 호스트 머신에 로그인해야 합니다.
- 시리얼 포트 도구를 사용하지 않고 호스트 머신에 로그인하지 마세요.
Katapult 펌웨어 컴파일
컴파일 시작
klipper서비스가 설치된 상위기기를 사용해야 합니다. 네트워크를 통해 SSH 연결하기- 그리고 장치를 상위기에 잘 연결해야 합니다.
- 주의: 일반적인 상위기기를 사용하십시오. 예를 들어 라즈베리 파이 FLY 패 등입니다. WiFi 스틱, 홍미폰 등의 모modified 상위기는 지원 문제가 많아 기술 지원을 제공할 수 없습니다.
ROOT사용자를 일반 사용자로 전환하려면 아래 명령어를 입력할 수 있습니다.ROOT사용자는 사용하지 마십시오.- fly 사용자는 다음을 입력할 수 있습니다:
su fly. fly 사용자가 아닌 경우<상위기기 사용자 이름>을 상위기기의 사용자 이름으로 바꾸십시오!
su <상위기기 사용자 이름>
Katapult 펌웨어 컴파일 및 구성 페이지 동작 설명
키보드 입력 모드가 반각 모드, 즉 영문 모드인지 확인하세요.
- 키보드의 상향 화살표 키
↑, 하향 화살표 키↓는 메뉴 항목을 선택하기 위해 위아래로 커서를 이동시키는 데 사용됩니다. - 확인 키
Enter또는 공백 키Space는 메뉴 항목을 체크하거나 하위 메뉴로 들어가는 데 사용됩니다. - 종료 키
ESC는 이전 메뉴로 돌아가기 위한 데 사용됩니다. Q키는 Katapult 펌웨어 구성 페이지를 종료하는 데 사용됩니다.- Katapult 펌웨어 구성 페이지를 종료할 때, 저장을 위한 프롬프트가 나타나면
Y키를 누릅니다.
다음은 펌웨어를 컴파일하는 방법입니다:
-
SSH에 연결한 후 아래 명령어를 입력하고 Enter 키를 누르세요:
cd ~/katapult && rm -rf ~/katapult/.config && rm -rf ~/katapult/out && make menuconfig -
여기서
rm -rf ~/Katapult/.config && rm -rf ~/Katapult/out는 이전 컴파일 데이터와 펌웨어를 삭제하고,make menuconfig는 펌웨어를 컴파일합니다. 실행 후 아래 화면이 나타납니다.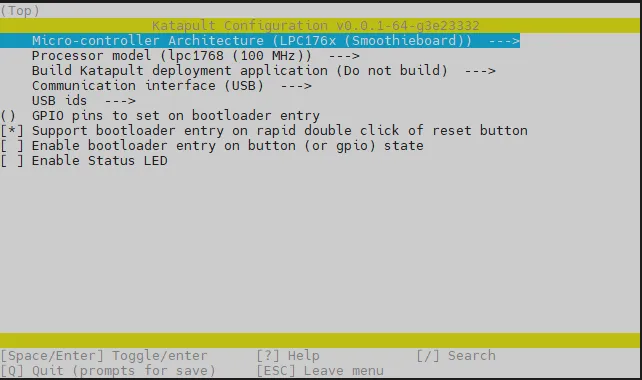
-
Micro-controller Architecture (LPC176x (Smoothieboard))를 선택하고 Enter 키를 누르세요. -
메뉴로 진입한 후, Raspberry Pi RP2040를 선택하고 Enter 키를 누르세요.

-
Build Katapult deployment application (Do not build)를 선택하고, Do not build를 선택하세요.
-
Communication interface를 선택하고, CAN bus를 선택하세요.

-
(4) CAN RX gpio number를 선택하고,4를 삭제하고1을 입력하세요. -
(5) CAN TX gpio number를 선택하고,5를 삭제하고0을 입력하세요.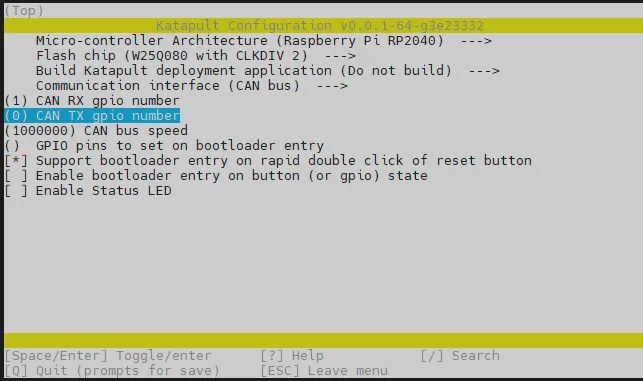
-
CAN bus speed는 기본적으로 1000000이며, 필요하다면 500000으로 변경하세요. -
이것은 1M의 것입니다.
-
이것은 5k의 것입니다.

-
Enable Status LED를 선택하고 Enter 키를 누르세요,
Status LED GPIO Pin (NEW)에!gpio18를 입력하세요.
영문 입력 모드에서 !gpio18를 입력하세요.
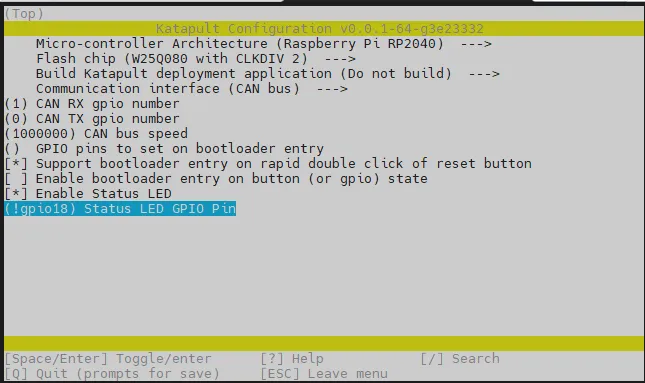
- 위의 그림과 일치하는지 확인하고, 일치하면 다음 단계로 진행하세요.
Q키를 누르면 Save configuration이 나타나고, 그때Y키를 누르세요.
- 이제 구성이 저장되고 명령줄 인터페이스로 돌아왔습니다.
make -j4를 입력하여 컴파일을 시작하세요. 시간이 좀 걸립니다.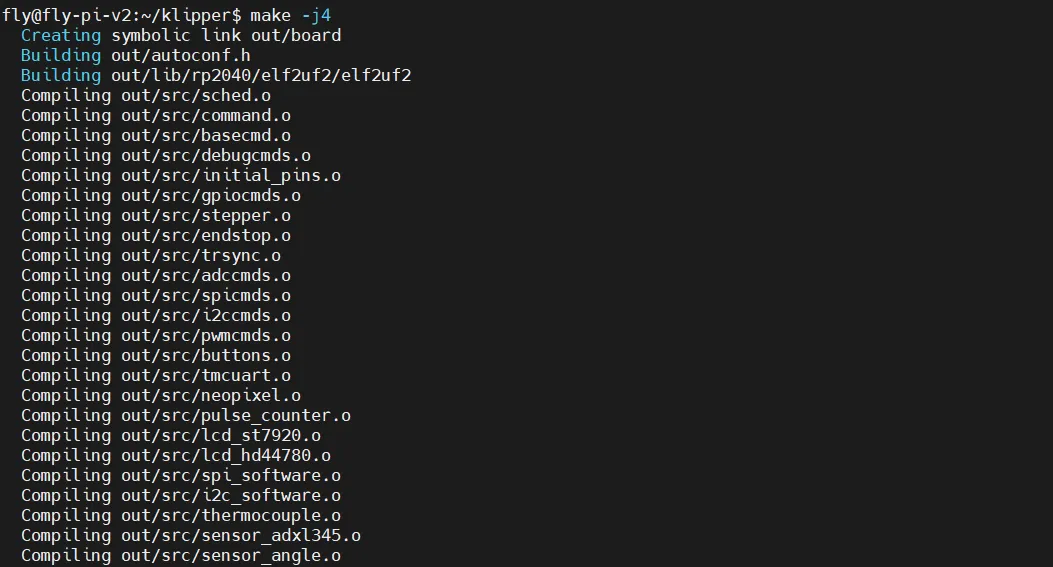
- 마지막으로 아래 내용이 출력되면 컴파일이 성공한 것입니다.
Linking out/katapult.elf
Creating bin file out/katapult.bin
Creating legacy binary out/canboot.bin
Building out/lib/rp2040/elf2uf2/elf2uf2
Creating uf2 file out/katapult.uf2
Creating legacy uf2 file out/canboot.uf2
Compiling out/src/deployer.o
Compiling out/src/generic/armcm_boot.o
Compiling out/src/generic/armcm_reset.o
Building out/deployer_ctr.o
Compiling out/katapult_payload.o
Preprocessing out/src/generic/armcm_deployer.ld
Linking out/deployer.elf
Creating hex file out/deployer.bin
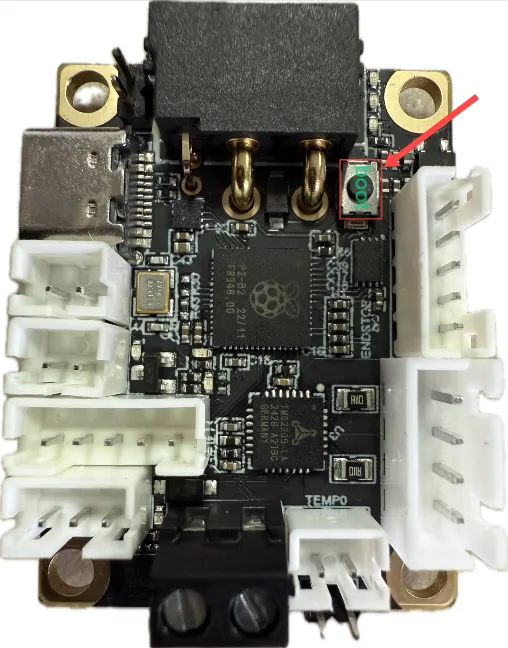
플래싱 모드 진입
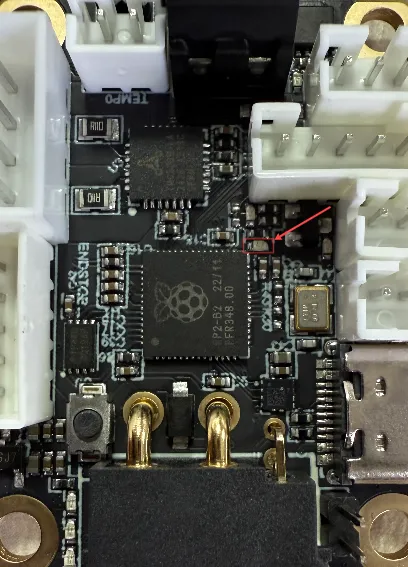
화살표가 가리키는 것이 BOOT 버튼입니다.
- 메인 보드가 완전히 전원이 꺼진 상태에서, BOOT 버튼을 누른 채 데이터 전송용 케이블의 한쪽 끝을 메인 보드에, 다른 한쪽 끝을 기기에 연결하세요.
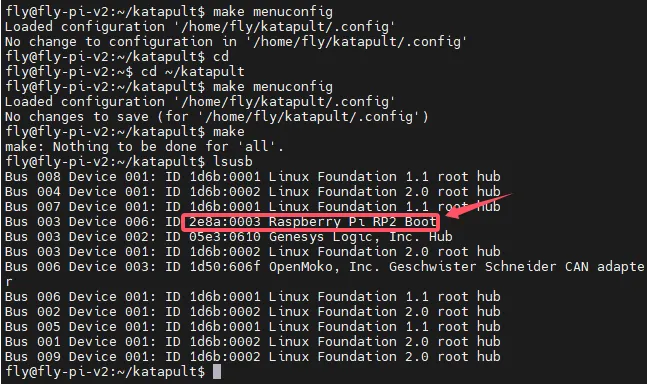
lsusb를 입력합니다.
lsusb
- 아래 이미지에서 볼 수 있는 것처럼, 부트 모드로 진입했다는 것을 나타냅니다.
- 아래 명령어를 입력하여 펌웨어를 플래시한 후 Enter 키를 누릅니다.
make flash FLASH_DEVICE=2e8a:0003
mellow를 입력하면 표시되지 않습니다.
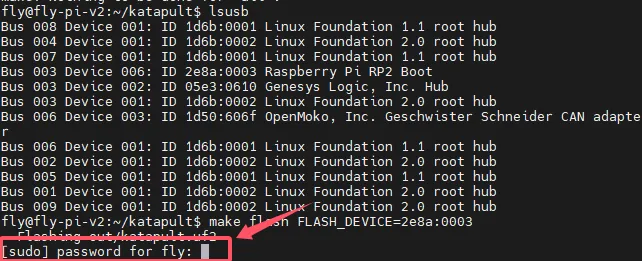
-
아래 이미지에서 볼 수 있는 경우,
mellow를 입력하고 완료하면 바로 Enter 키를 누르세요. -
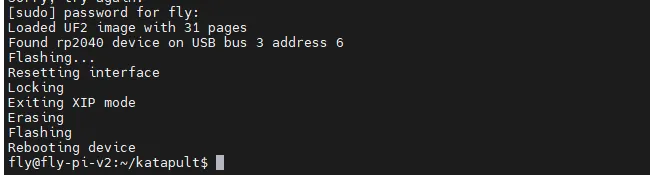
아래 이미지에서 볼 수 있는 메시지가 나타나면,
축하합니다펌웨어 플래시가 성공했습니다.
펌웨어가 제대로 시작되었는지 확인
- 펌웨어가 정상적으로 시작되면 LED가 깜빡거립니다.
- can ID를 검색하는 명령어를 입력한 후 Enter 키를 누릅니다.
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
- 위 명령어가 can ID를 검색하지 못했다면, 아래 명령어를 시도해보세요.
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can1
입력 후 아래 이미지에서 볼 수 있는 ID가 나타납니다. 이 ID는 참고용이며 실제 사용에 불가능합니다.
