설치 BDsensor-m
센서 케이블을 보드의 EXP1 인터페이스에 연결
-
센서의 케이블 길이가 부족하다면 패키지에 포함된 딜레이 라인을 사용하세요.
-
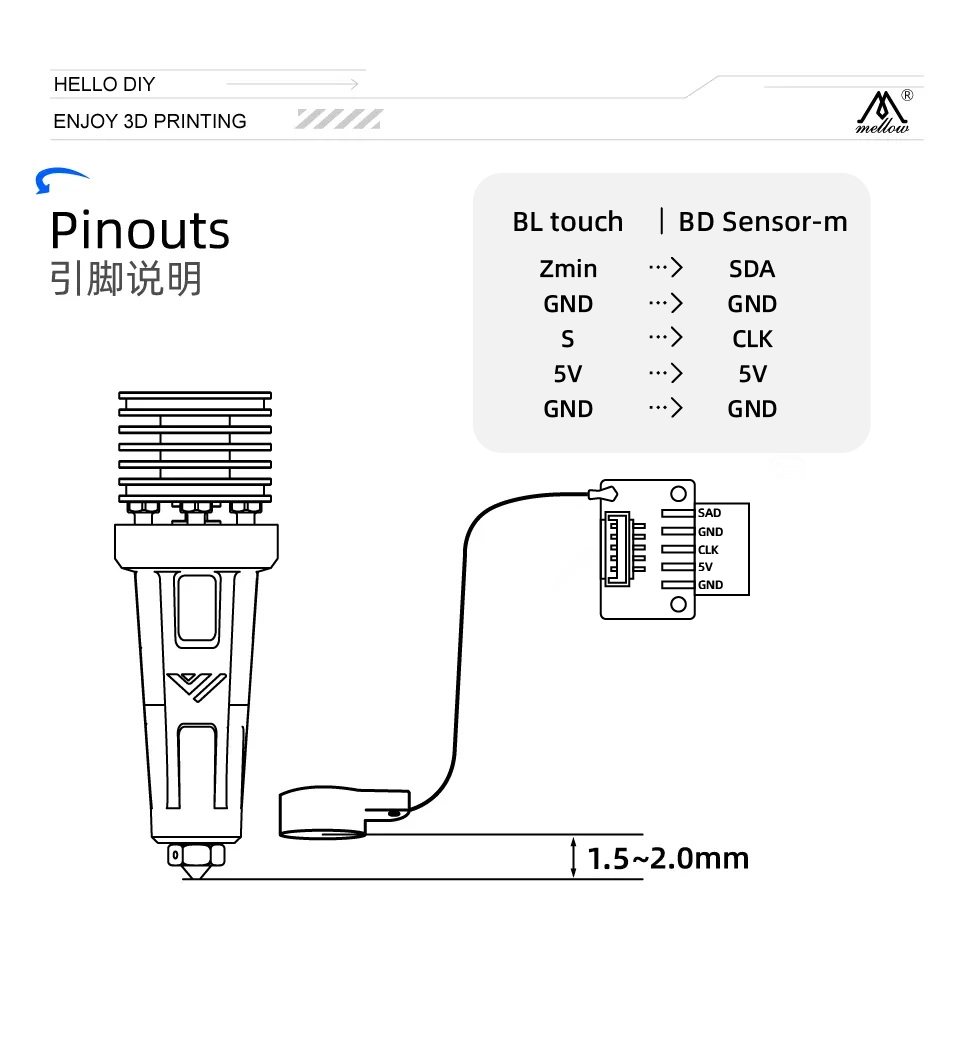
BDsensor-m의 CLK와 SDA 선은 회로판의 어떤 GPIO 핀에도 연결할 수 있습니다. 또한 BD 센서 케이블을 Bltouch 포트에 직접 연결할 수도 있습니다. 예를 들어:
BLtouch | BDsensor-m
5V --> 5V
GND --> GND
S --> CLK/SCL (Input)
GND --> GND
Zmin --> SDA (Input/Output) -
보드 커넥터의 일부 핀이 MCU의 gpios에 직접 연결되지 않을 수 있습니다(예를 들어, 필터 캐패시터나 MOSFET, 다이오드 또는 광커플러를 통해 격리될 수 있음). 그러나 저항을 통해 격리되는 경우에도
BDsensor-m과 함께 사용할 수 없습니다. 그리고 펌웨어는 연결 오류를 보고할 것입니다. 예를 들어 -
팬과 히터의 커넥터는 MOSFET을 통해 격리됩니다.
-
일부 보드에서 온도 핫랜드저항 및 엔드스톱/프로브용 커넥터는 일반적으로 필터 캐패시터를 통해 GND에 연결됩니다.
-
아래 그림과 같이 BD 센서를 열단자 근처에 설치합니다. mount STL, STL_mount_VzBot_Goliath short
Klipper 펌웨어에 패치 설치
-
설명서에 언급되지 않은 것은 하지 마세요.
-
이전에 수정한 Klipper 파일을 포기하고 Klipper를 업데이트하세요.
cd
cd ~/klipper
git checkout .
git pull -
사용자 디렉토리에서 아래 git 명령어를 실행하여 BD 센서의 최신 코드를 클론하세요.
cd && git clone https://github.com/markniu/Bed_Distance_sensor.git -
그런 다음 아래 명령어를 실행하여 설치하세요.
cd ~/Bed_Distance_sensor/klipper/
./install_BDsensor.sh
여기서 업로드기와 다운로드기가 일치하지 않는다는 경고가 표시되면 새로운 Klipper 펌웨어를 컴파일하세요.
-
펌웨어를 컴파일하려면 자신의 펌웨어 컴파일 가이드를 참조하세요.
-
펌웨어 컴파일
cd ~/klipper/ # Klipper 디렉토리로 이동
make menuconfig # Klipper 컴파일 인터페이스 명령어
make clean # 정리 명령어
make # 컴파일 명령어 -
펌웨어를 BD 센서가 연결된 보드에 플래시하세요.
Moonraker를 사용하는 프린터의 경우 Moonraker.conf에 아래 부분을 추가하세요. 그러면 웹 페이지 또는 KlipperScreen에서 한 번의 클릭으로 BDsensor를 업데이트할 수 있습니다.
[update_manager BDsensor]
type: git_repo
primary_branch: new
channel: dev
path: ~/Bed_Distance_sensor
origin: https://github.com/markniu/Bed_Distance_sensor.git
install_script: ./klipper/install_BDsensor.sh
is_system_service: False
managed_services: klipper
info_tags:
desc=Bed Distance Sensor
printer.cfg 편집
-
아래 부분을 printer.cfg에 복사하고
[BDsensor]의sda_pin과scl_pin을 편집하세요. 또한 BLtouch과 같은 다른 프로브 부분을 비활성화하지도 않아야 합니다. 보드 또는 도구헤드 CAN 모듈에 BD 센서를 연결할 수 있습니다, -
[BDsensor]에서speed를 0.8로 수정하세요. 이 값은 z 기울기와 PROBE_ACCURACY 명령에만 적용됩니다. 값이 작을수록 MC가 BD 센서를 정상적인 제동장치처럼 실시간으로 읽을 때 정밀도가 더 높습니다. -
Z축 원점으로 되돌릴 때 BD 센서를 리미트 스위치로 사용하려면
[stepper_z]의endstop_pin을endstop_pin: probe:z_virtual_endstop로 변경하세요. -
printer.cfg에
[safe_z_home]이 있어야 합니다. -
[bed_mesh]와[z_tilt]또는[quad_gantry_level]의[quad_gantry_level]값을 1로 변경하세요(추천값은 0.7-1.0mm). Klipper의 기본값은 5mm이며 이를 초과하면 센서 범위를 벗어날 수 있습니다. -
노즐 높이는
z_adjust:설정에서만 적합합니다. 양수는 열판에 가깝게, 음수는 멀어지게 합니다. 다른 노즐 높이 조정 설정에는 버그가 있을 수 있습니다. -
빠른 침대 스캔을 활성화하려면
no_stop_probe:true앞의 #을 삭제하세요. -
아래는 구성 예제입니다.
[BDsensor]
scl_pin:PC6 # 서보 신호 출력
sda_pin:PC3 # 제한 신호 입력
delay: 20 # 20us 펄스당, 이 값은 20 이상이어야 하지만 50 미만이어야 합니다.
z_offset:0 # 이 `z_offset`은 0으로 설정해야 합니다.
z_adjust:0.0 # z 축 조정, z_offset 기능을 대체합니다. -0.3mm에서 0.3mm 사이
x_offset: -34
y_offset: 0
#no_stop_probe:true # 빠른 프로브를 위해 활성화, 도구헤드가 프로브 지점에서 멈추지 않습니다.
position_endstop: 0.8 # Z축이 홈 중에 이 위치(mm)에서 멈춥니다. 추천값은 0.4~1.0
#speed:0.8 # 이 속도는 z 기울기와 PROBE_ACCURACY 명령에만 적용됩니다.
[stepper_z]
endstop_pin: probe:z_virtual_endstop
#position_endstop: 0.5
homing_speed: 5
second_homing_speed: 0.8
[bed_mesh]
speed: 200
horizontal_move_z:1
algorithm: bicubic
[quad_gantry_level]
horizontal_move_z:1
설치 후 다음 GCODE 명령어를 보내어 확인하세요
M102 S-1 # 센서 정보 읽기
M102 S-2 # 거리 값 읽기
연결 확인
-
콘솔에서
M102 S-1을 보내세요. 이것은 반환 메시지의 예입니다. 반환 값이 공백이나 다른 문자열이면 연결과 배선 순서를 확인하세요.Send: M102 S-1
Recv: V1.0 pandapi3d.com
캘리브레이션
- 노즐을 청소한 후, 콘솔을 통해 Z축을 이동시켜 노즐이 침대 표면에 약간 접촉하도록 하세요 (BDsensor-m는 이 위치를 0 위치로 사용하기 때문에
z_offset이 필요하지 않습니다. 이것이[BDsensor-m]섹션의 값이 0인 이유입니다). - 콘솔에서 GCODE 명령
M102 S-6을 보내세요. 프린터가 Z축을 매번 0.1mm씩 천천히 위로 이동시키면서 4mm까지 도달할 때까지 반복합니다. 센서를 설치하기 전에 M102 S-6을 실행하지 마세요. 또한 캘리브이션 중에 프린터 전원을 끄지 마세요. 그렇지 않으면 이전의 캘리브레이션 데이터가 삭제됩니다. 이 경우 다시 캘리브레이션해야 합니다. - 그런 다음
M102 S-5를 통해 BD 센서가 성공적으로 캘리브레이션되었는지 확인할 수 있습니다. 이 명령은 BD 센서에 저장된 원래 캘리브레이션 데이터를 반환합니다.
주의사항:
-
Z축 재설정 속도는 최상이 5입니다.
-
M102 S-5가 반환하는 첫 번째 원래 캘리브레이션 데이터가 400보다 크다면 센서가 너무 높게 설치된 것이므로 침대에 더 가까운 곳에 재설치해야 합니다. 첫 번째 데이터의 권장 값은 100입니다. 또한 두 번째 데이터 값이 첫 번째 데이터 값보다 10 이상 큰지 확인하세요.
-
FAQ: 캘리브레이션 데이터가 1로 시작하고 두 번째 값이 9, 세 번째 값이 24라면 무엇을 의미합니까?
-
이는 0-0.1mm 사이의 해상도가 9이고 0.1-0.2mm의 해상도가 15임을 의미합니다. 따라서 다시 캘리브레이션하여 0-0.1mm의 첫 번째 해상도가 10 이상이 되도록 하는 것이 좋습니다.
-
-
G28을 실행하거나
Z_tilt와quad_gantry_level을 조정한 후 Z축 높이를 조정하지 않도록 주의하세요. -
파트 이름은 올바르게 대문자와 소문자를 사용해야 하며 그렇지 않으면 Klipper는
Unknown pin chip name 'probe'를 보고합니다.