- オンボードが正常にネットワークに接続されていることを確認してください
- ファームウェアをコンパイルする前に、ネットワーク経由でSSHを使ってオンボードにログインしてください
- シリアルポートツールを使用せずにオンボードにログインしないでください
Katapultファームウェアのコンパイル
コンパイル開始
klipperサービスがインストールされた上位機を使用する必要があります ネットワーク経由でSSHに接続- そしてデバイスを上位機に接続してください
- 注意:一般的な上位機を使用してください。例えば、ラズベリーパイやFLY派などです。改造された上位機(例:WiFiスティック、レッドミーなど)は問題が多いので、技術サポートを提供できません
- 下記のコマンドを入力して
ROOTユーザーから通常のユーザーに切り替えることができます ROOTユーザーを使用しないでください- flyユーザーの場合、
su flyと直接入力できます。flyユーザー以外の場合、<あなたの上位機のユーザーネーム>をあなたの上位機のユーザーネームに置き換えてください!
su <あなたの上位機のユーザーネーム>
Katapultファームウェアのコンパイルと設定ページ操作説明
キーボード入力モードは半角(英語)モードであることを確認してください
- キーボードの上キー
↑、下キー↓はカーソルを上下移動させてメニュー項目を選択します - 確認キー
EnterまたはスペースキーSpaceはメニュー項目にチェックを入れたりサブメニューに入ります - 戻るキー
ESCは一つ上のメニューに戻ります QキーはKatapultファームウェア設定ページから退出しますYキーはKatapultファームウェア設定ページから退出するときに、プロンプトがある場合はYキーを押して設定ファイルを保存します
以下にファームウェアのコンパイル方法を説明します:
-
SSHに接続したら、次のコマンドを入力し、エンターを押します。
cd ~/katapult && rm -rf ~/katapult/.config && rm -rf ~/katapult/out && make menuconfig -
ここで
rm -rf ~/katapult/.config && rm -rf ~/katapult/outは以前のコンパイルデータとファームウェアを削除し、make menuconfigはファームウェアをコンパイルします。実行後、以下のインターフェースが表示されます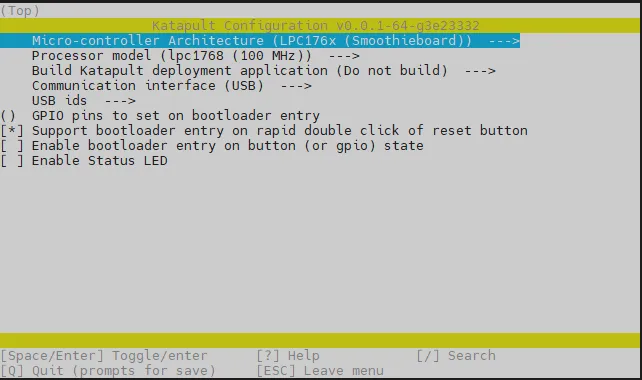
-
Micro-controller Architecture (LPC176x (Smoothieboard))を選択し、エンターを押します -
メニューに入り、次にRaspberry Pi RP2040を選択し、エンターを押します

-
Build Katapult deployment application (Do not build)を選択し、Do not buildを選択します
-
Communication interfaceを選択し、CAN busを選択します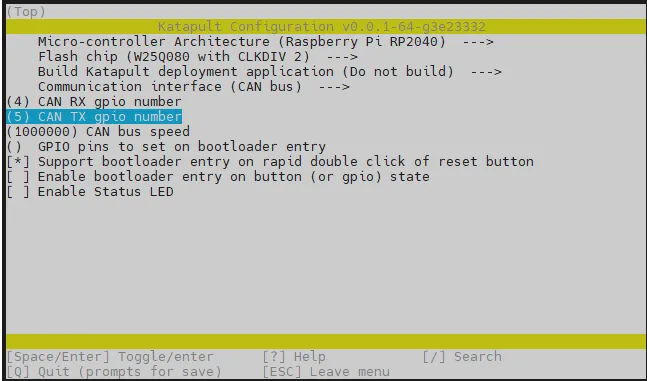
-
(4) CAN RX gpio numberを選択し、4を削除して1を入力します -
(5) CAN TX gpio numberを選択し、5を削除して0を入力します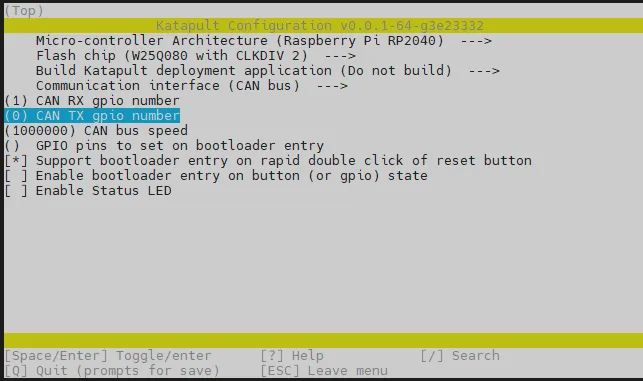
-
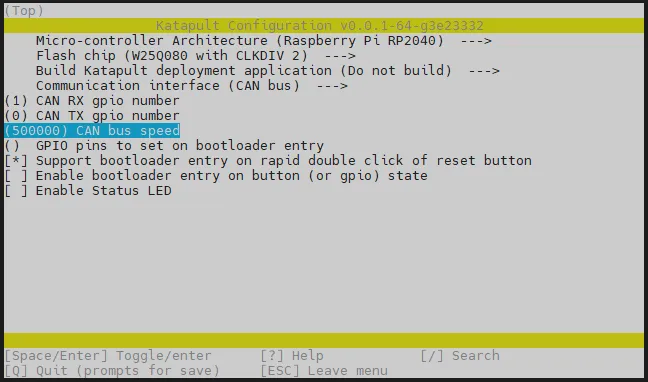
CAN bus speedのデフォルトは1000000です。必要に応じて500000に変更します -
これは1Mの
-
これは5kの
-
Enable Status LEDを選択し、エンターを押します。次にStatus LED GPIO Pin (NEW)に入力:!gpio18
英語入力モードで!gpio18を入力してください
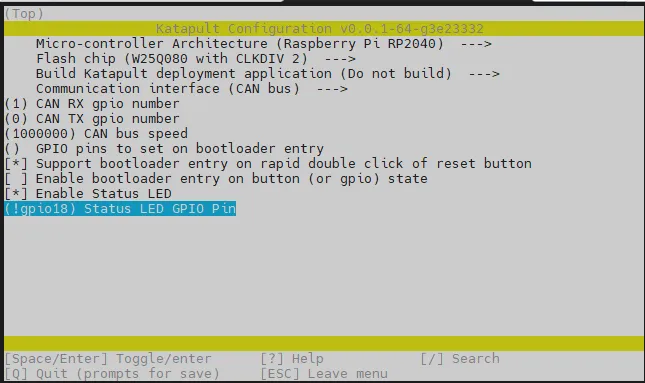
- 上図と照らし合わせて、上図と一致していることを確認し、次に進んでください
Qキーを押すと、Save configurationが出ます。このときYキーを押します
- これで設定が保存され、コマンドラインインターフェースに戻ったはずです
make -j4を入力してコンパイルを開始します。時間がかかります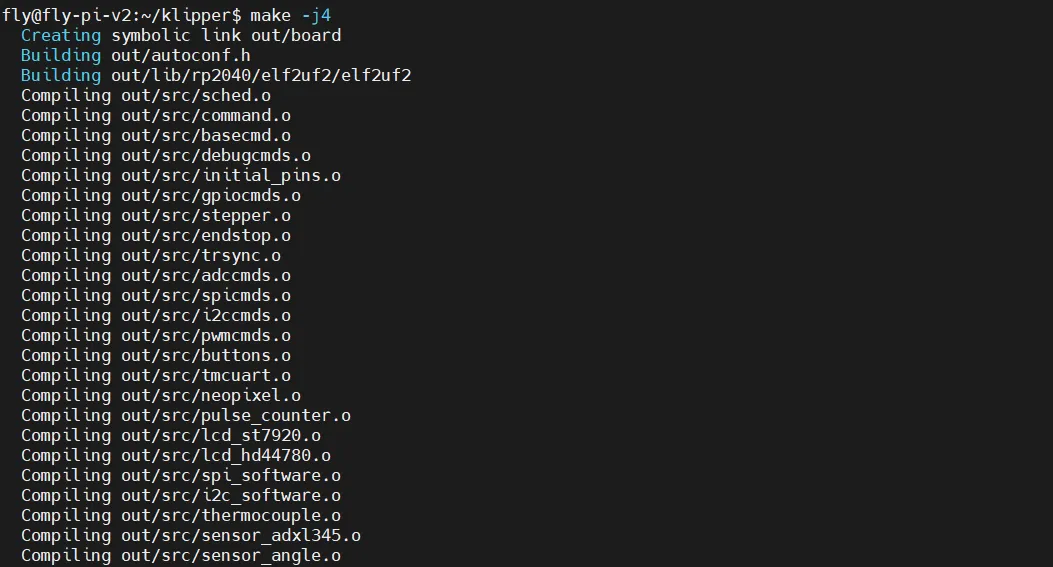
- 最後に以下の内容が出力されたらコンパイル成功です
Linking out/katapult.elf
Creating bin file out/katapult.bin
Creating legacy binary out/canboot.bin
Building out/lib/rp2040/elf2uf2/elf2uf2
Creating uf2 file out/katapult.uf2
Creating legacy uf2 file out/canboot.uf2
Compiling out/src/deployer.o
Compiling out/src/generic/armcm_boot.o
Compiling out/src/generic/armcm_reset.o
Building out/deployer_ctr.o
Compiling out/katapult_payload.o
Preprocessing out/src/generic/armcm_deployer.ld
Linking out/deployer.elf
Creating hex file out/deployer.bin
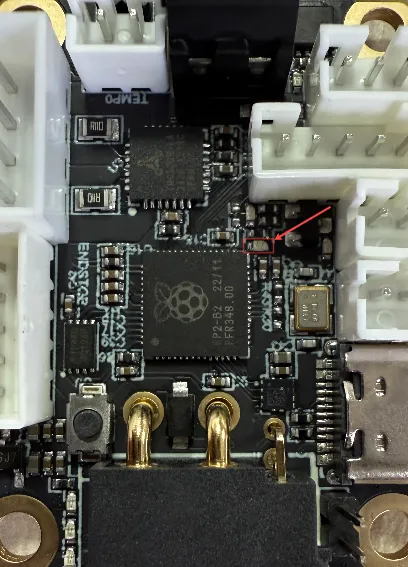
フラッシュモードに入る
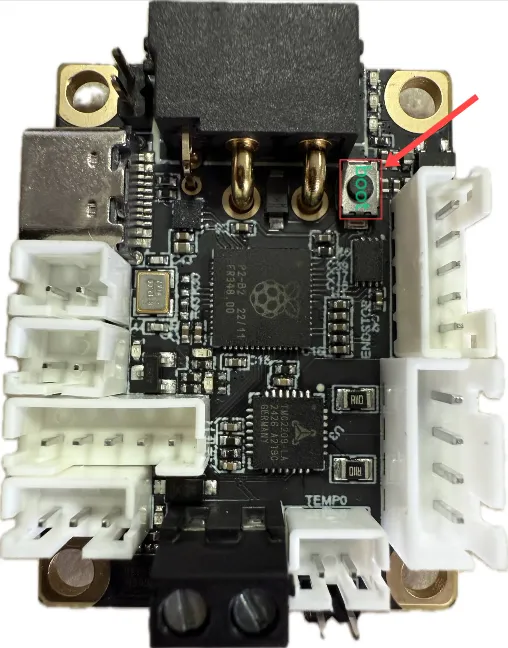
矢印で示されているのがBOOTボタンです
- メインボードが完全に電源オフになっている状態で、BOOTボタンを押したまま、データ転送用のケーブルを一方をメインボードに、もう一方をあなたのデバイスに接続します
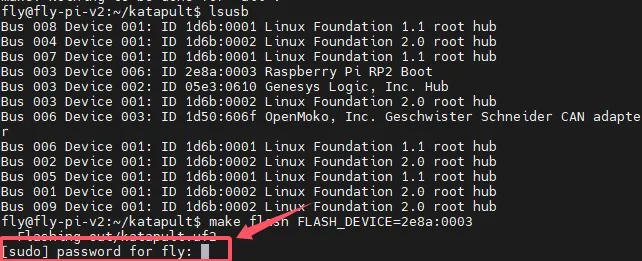
lsusbを入力します
lsusb
- 以下の画像に示されるように、
lsusbの出力が表示されたら、ブートモードに入ったことを確認できます
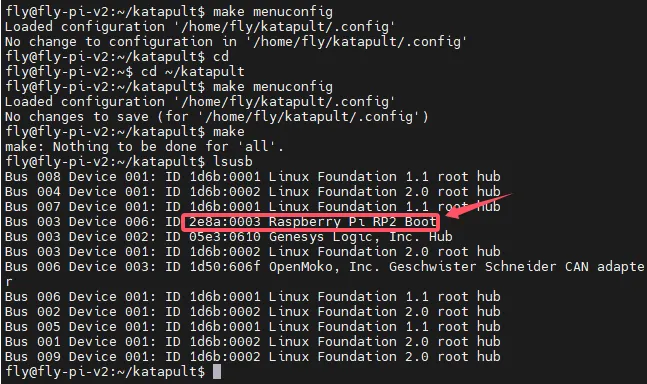
- 以下のコマンドを入力してファームウェアのフラッシュを行います。その後エンターを押します
make flash FLASH_DEVICE=2e8a:0003
mellowを入力しても表示されません
-
上記の画像のような状況になったら、
mellowを入力して完了し、エンターを押します -
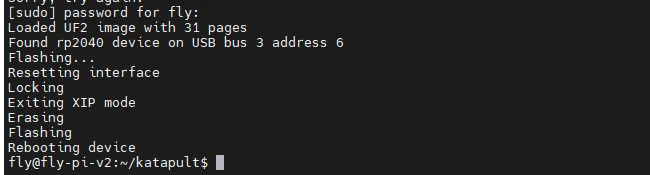
上記の画像のようなメッセージが出たら、
おめでとうございます、フラッシュが成功しました
ファームウェアが起動したかの確認
- ファームウェアが正常に起動するとLEDが点滅します
can idを検索するコマンドを入力し、エンターを押します
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
- 上記のコマンドが
can idを見つけられなかった場合、以下のコマンドを試してみてください
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can1
入力後、以下の画像のようなcan idが出力されます。ここでのcan idは参照値であり、使用できません
