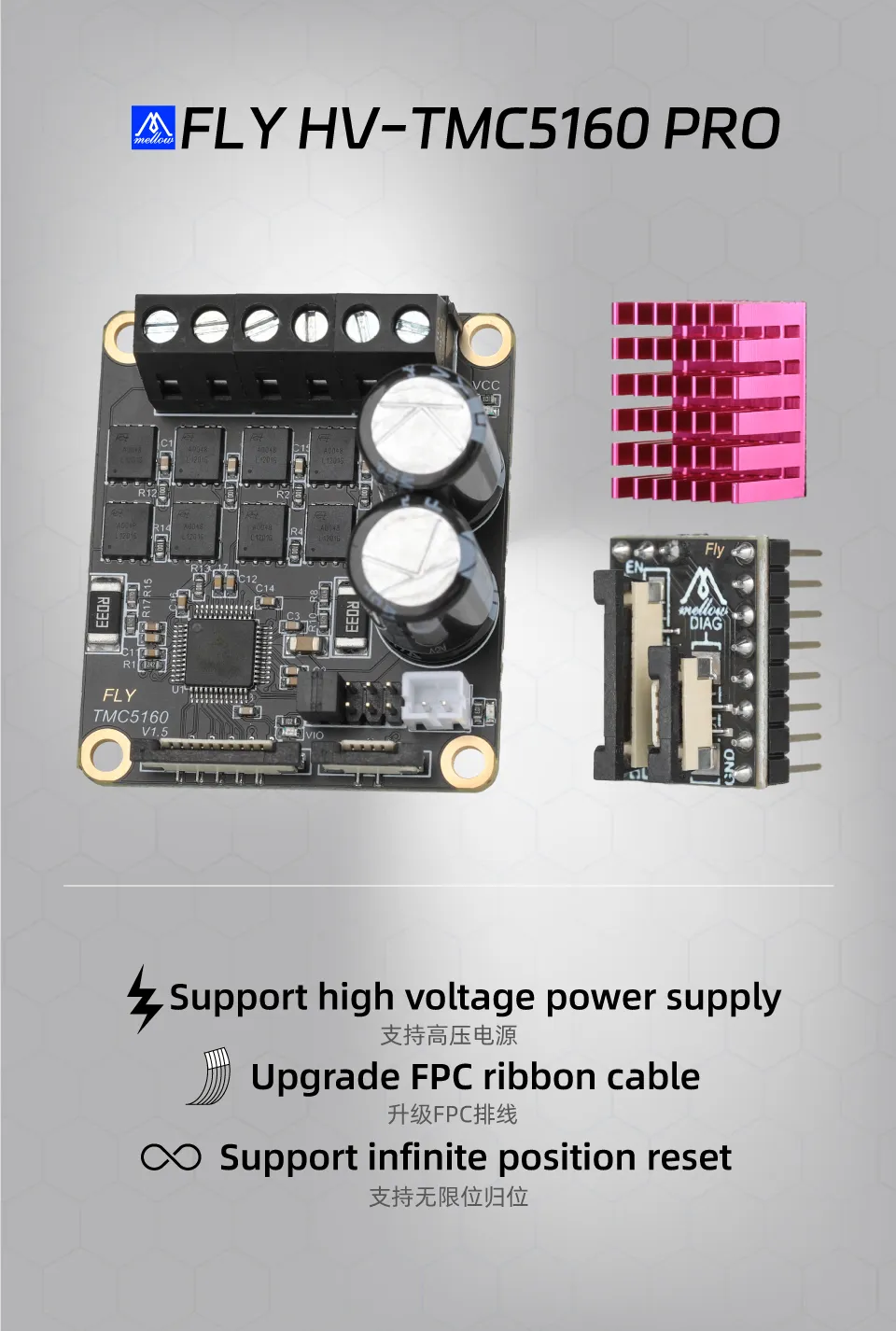
TMC 5160 Pro V1.5
基本参数
- 入力電圧:24-48V
- 最大電流:6A
- 対応する:Marlin/Klipper/RRFファームウェア
- ドライバーモードサポート:TMC:SPI
- ステップ/ディレクションインターフェースはマイクロポリヤー付きのマイクロステッピングをサポート
- 最高分解能は256分割
- stealthChop2の静かな動作とスムーズな動きをサポート
- 中周波数共振の共振抑制をサポート
- spreadCycleの高ダイナミックモーターコントロールチャープをサポート
- dcStepの負荷関連速度制御をサポート
- stallGuard2の高精度無センサーモーターロード検出をサポート
- coolStepの電流制御をサポートし、最大で75%のエネルギー効率を向上
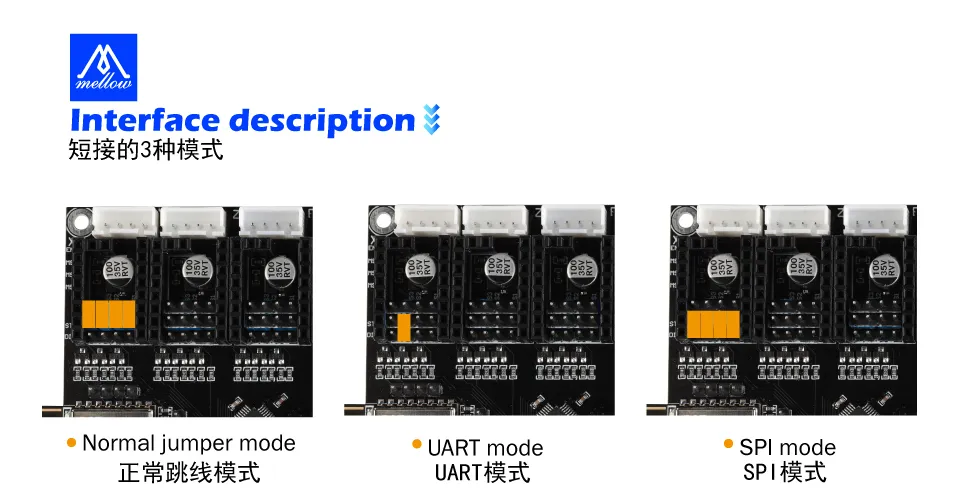
メインボードジャンパーリスト明細
- TMC5160 ProはSPIジャンパーを使用します
- FLYドライバーのSPIピンは左から下に数えて4番目のピンで、CSピンはSPIピンです。メインボードが対応するピン位置でない場合は、SPIを使用できません
メインボードFPCインストール

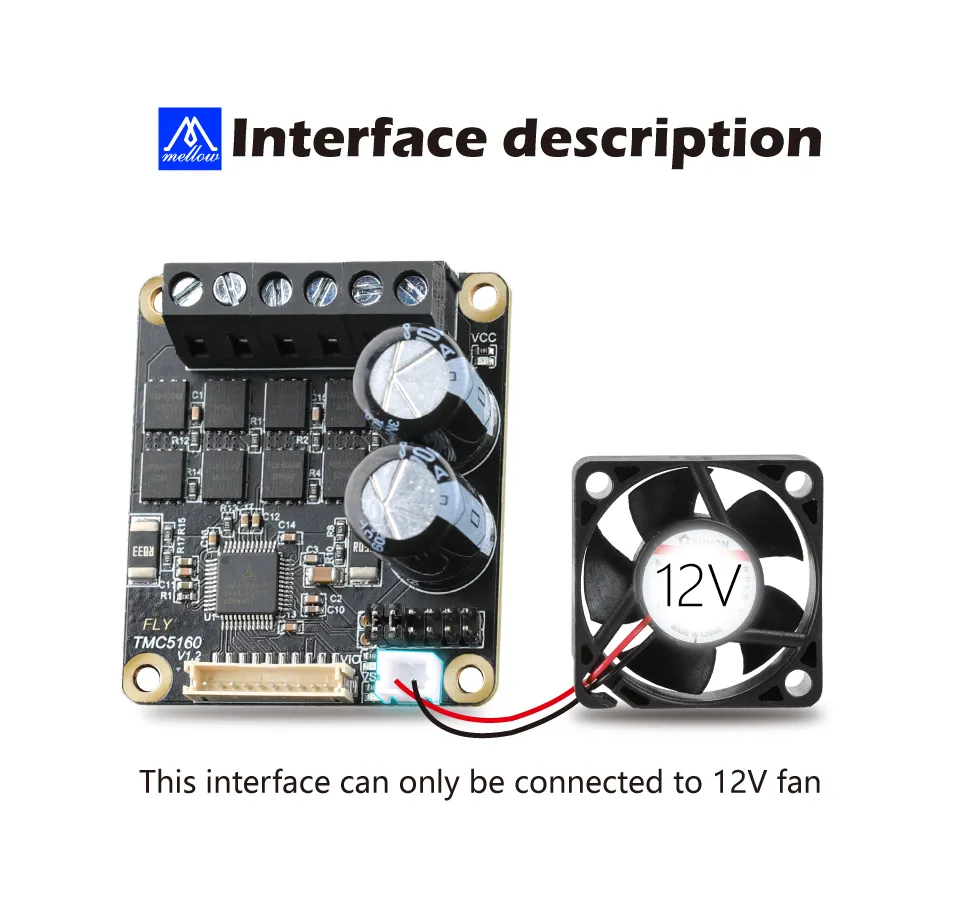
12V FAN配線
TMC5160 Pro 参考設定
危ない
- ドライバーサンプリング抵抗は
sense_resistor: 0.033に設定してください。間違った設定は避けてください - spi_busとspi_softwareはどちらか一方を選択してください
SPIモード参考設定
[tmc5160 stepper_x]
cs_pin:
spi_bus:
# spi_software_mosi_pin:
# spi_software_miso_pin:
# spi_software_sclk_pin:
run_current: 1.0 # モーター運転電流値
interpolate: False # 256マイクロステッピングの有効化(有効はTrue、無効はFalse)
sense_resistor: 0.033
stealthchop_threshold: 0
driver_DISS2G: 1
driver_DISS2VS: 1
限位なし使用説明
::: tip 無限位使用ヒント
- 無限位を使用するには、1つの限位口を占有する必要があります。通常、1番ドライブ位置はIO1を使用し、2番ドライブ位置はIO2を使用するなどして順次使用します
- 無限位を使用する際の注意点として、対応する限位口に何も接続しないでください
- FLYの一部のマザーボードはドライブポートが直結されていますので、DIAGが対応するピンに直結されているかどうかに注意してください
:::
限位なし使用ヒント
- このドライバーを使用するには、4ピンのFPCをインストールする必要があります
- 以前の
endstop_pin:はブロックまたは削除し、endstop_pin: tmc5160_stepper_x:virtual_endstopを追加してください diag0_pin:を設定した後、リミット状態はトリガーされていませんdriver_SGT:は適切な値をテストする必要があります
- 参考設定
[stepper_x]
# endstop_pin:PF3
endstop_pin: tmc5160_stepper_x:virtual_endstop
homing_retract_dist: 0 # 0にするとリターンが0になり、ホームが失敗する可能性があります
[tmc5160 stepper_x]
diag0_pin: ^!
driver_SGT: 1
# 設定した後はリミット状態がトリガーされていないことを確認してください
# このピンは通常、内部プルアップを有効にするために"^"プレフィックスを使用します
# 感度はベルトの緩みに依存し、調整が必要です
# (適切な感度を設定するためにdriver_SGTHRSも設定することを確認してください)
Loading...