メインボード配線
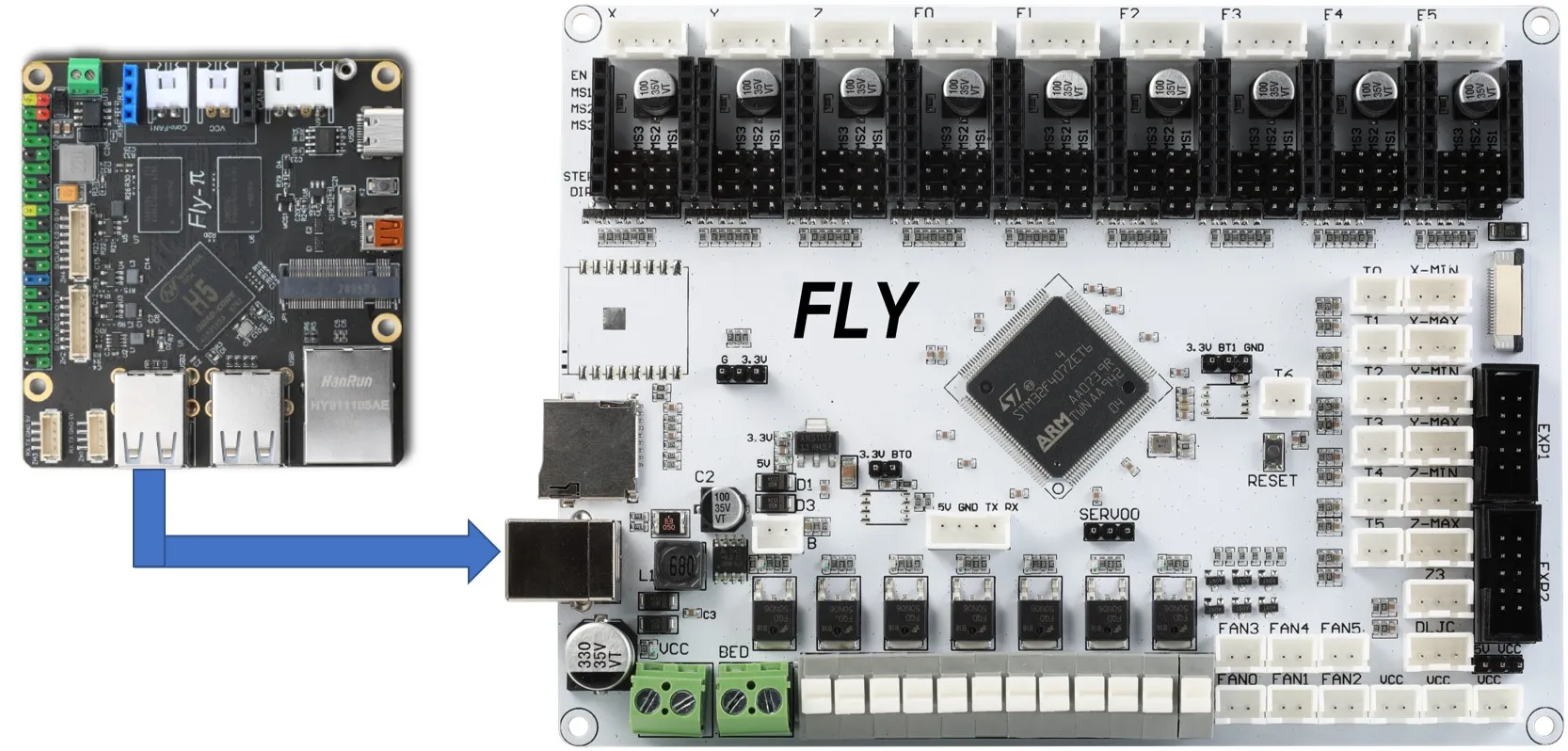
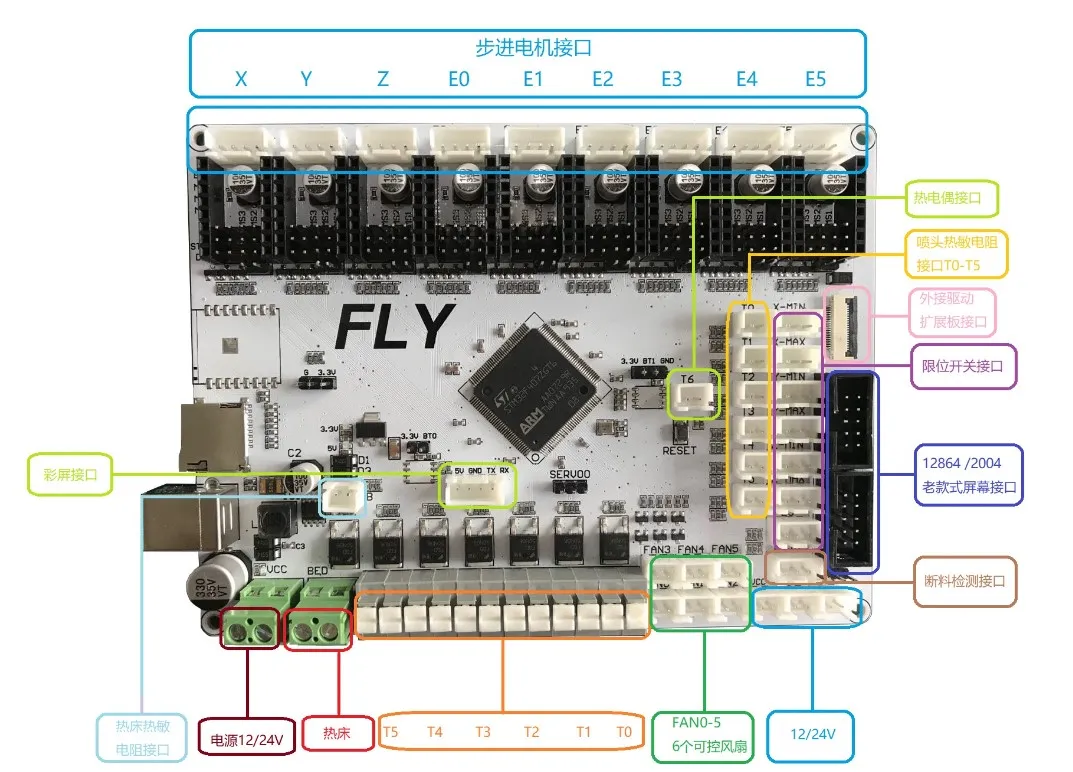
インターフェース図
インターフェース説明
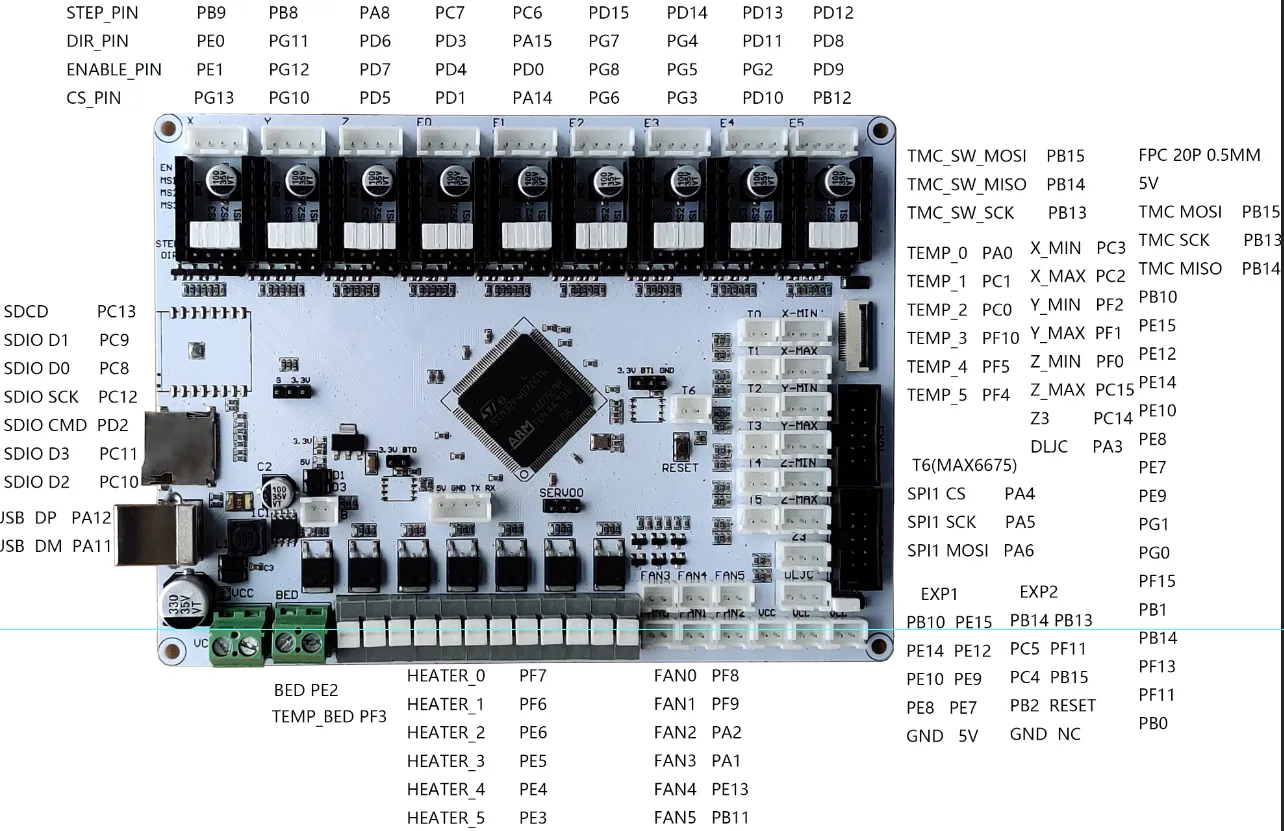
ピン説明
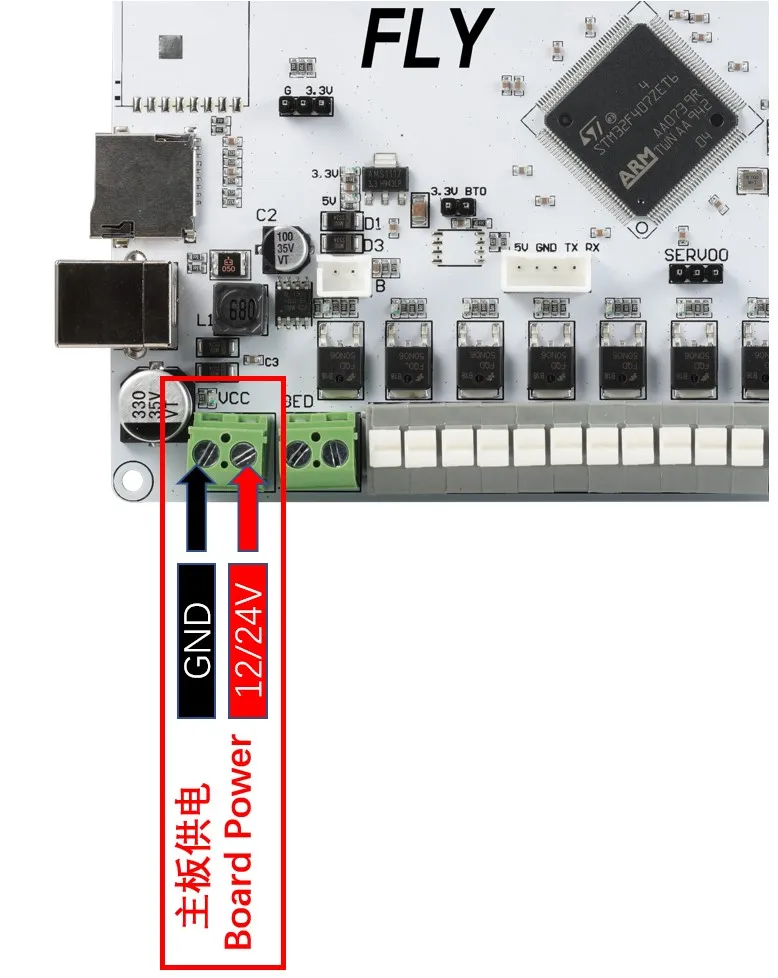
電源配線
ドライバ取り付け
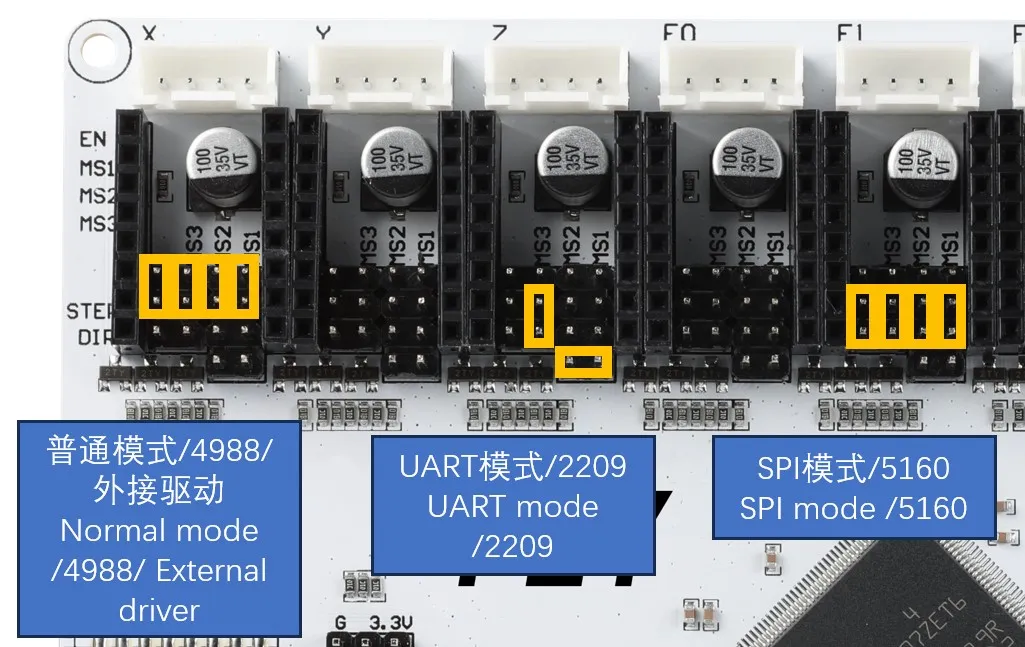
メインボードドライバジャンパ
-
STEP/DIRモード。 このモードでは、ジャンパキャップを使用してマイクロステップを設定し、ポテンショメータで電流を調整します。最も一般的なA4988、8825ドライバはメーカが提供するマイクロステップ設定表を確認し、ジャンパキャップでマイクロステップを設定する必要があります。
-
UARTモード。 このモードを使用する一般的なドライバには、TMC2208、TMC2209、TMC2226などがあります。この種のドライバチップはマイコンとUART非同期シリアル通信が可能で、構成ファイルを変更することでドライバのマイクロステップ、運転電流、静音モードなどを設定できます。
-
SPIモード。 このモードを使用する一般的なドライバには、TMC5160、TMC2130、TMC2240などがあり、構成ファイルを変更することでドライバのマイクロステップ、運転電流、静音モードなどを設定できます。
ドライバの取り付け
-
ドライバを設置する前には適切な確認を行う必要があります。さもなくばドライバやメインボードを破損させる可能性があります。
-
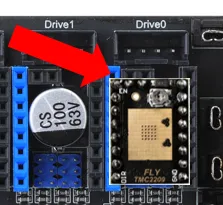
FLYドライバ: 無限原点復帰機能を使用しない場合は、ダイヤルスイッチを「1」の位置に設定してください。逆に無限原点復帰機能を使用する場合は、ダイヤルスイッチを「ON」の位置に設定してください。
 危ない
危ない- 注意!!! ドライバモジュールを設置する際には、ENピンが左上になるように正しい方向に挿入してください。さもなくばドライバやメインボードを破損させる可能性があります!!!ドライバに必ずヒートシンクを取り付けてください!!!
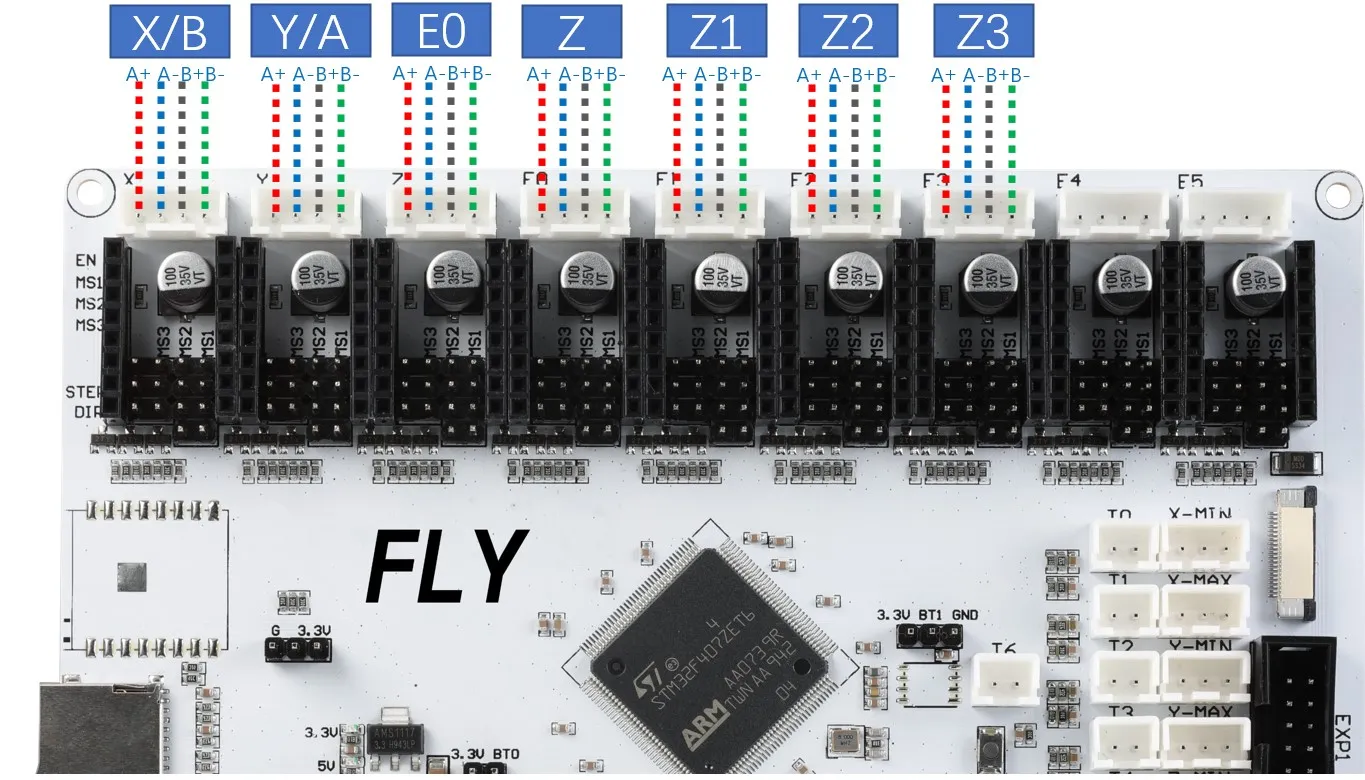
ステッピングモータ配線
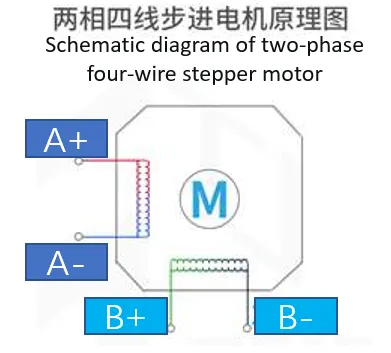
- どのメーカーが製造した二相ステッピングモータでも、最終的に出てくる配線は4本です。色が何であっても、黒、白、緑、黄など関係なく、対応する4本の配線があります。したがって、配線をA、Bの2グループに分ける必要があります。
- 二相四線式ステッピングモータの場合、どのグループがAかBかを知る必要はありません。同じグループであることがわかれば十分で、モータの方向は構成内で変更できます。
-
3Dプリンタで最も一般的なのは二相四線式ステッピングモータであり、その原理図を以下に示します。ステッピングモータの配線順序を判別するには次の2つの方法があります:
- 任意の2本の相線を接続し、手でモータ軸を回したときに明確な抵抗感があれば、その2本の相線は同一グループです。逆に抵抗感がなければ同一グループではなく、他の相線をテストする必要があります。
- テスターを使用し、導通測定モードにしてステッピングモータの任意の2本の相線を測定し、導通すれば同一グループです。導通しなければ同一グループではありません。他の相線をテストする必要があります。
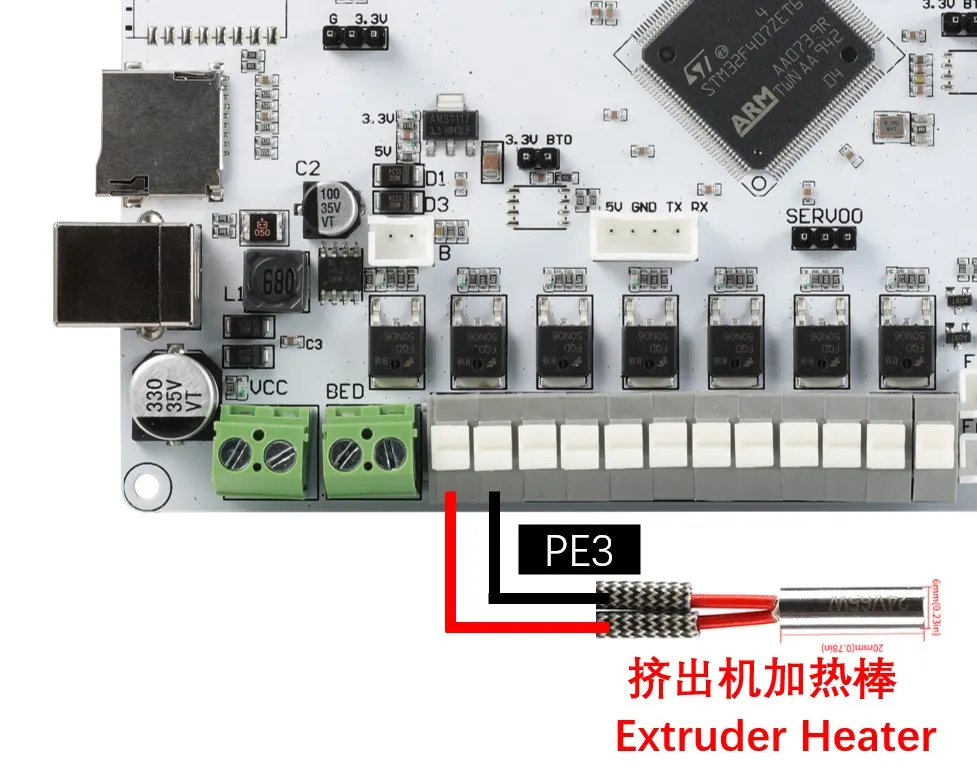
ヒータ配線
ホットベッド配線
-
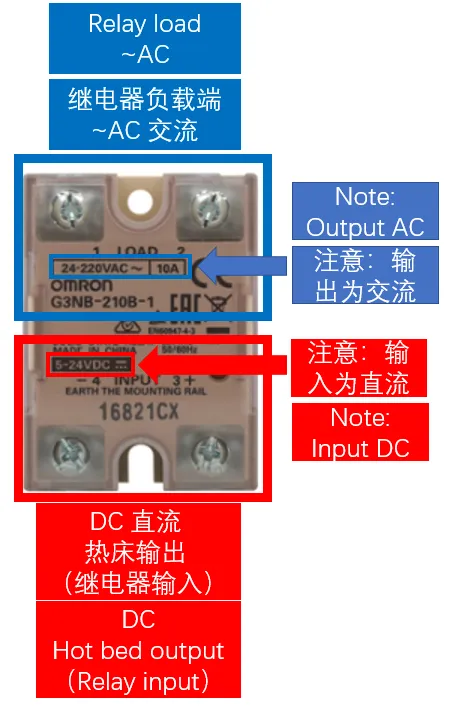
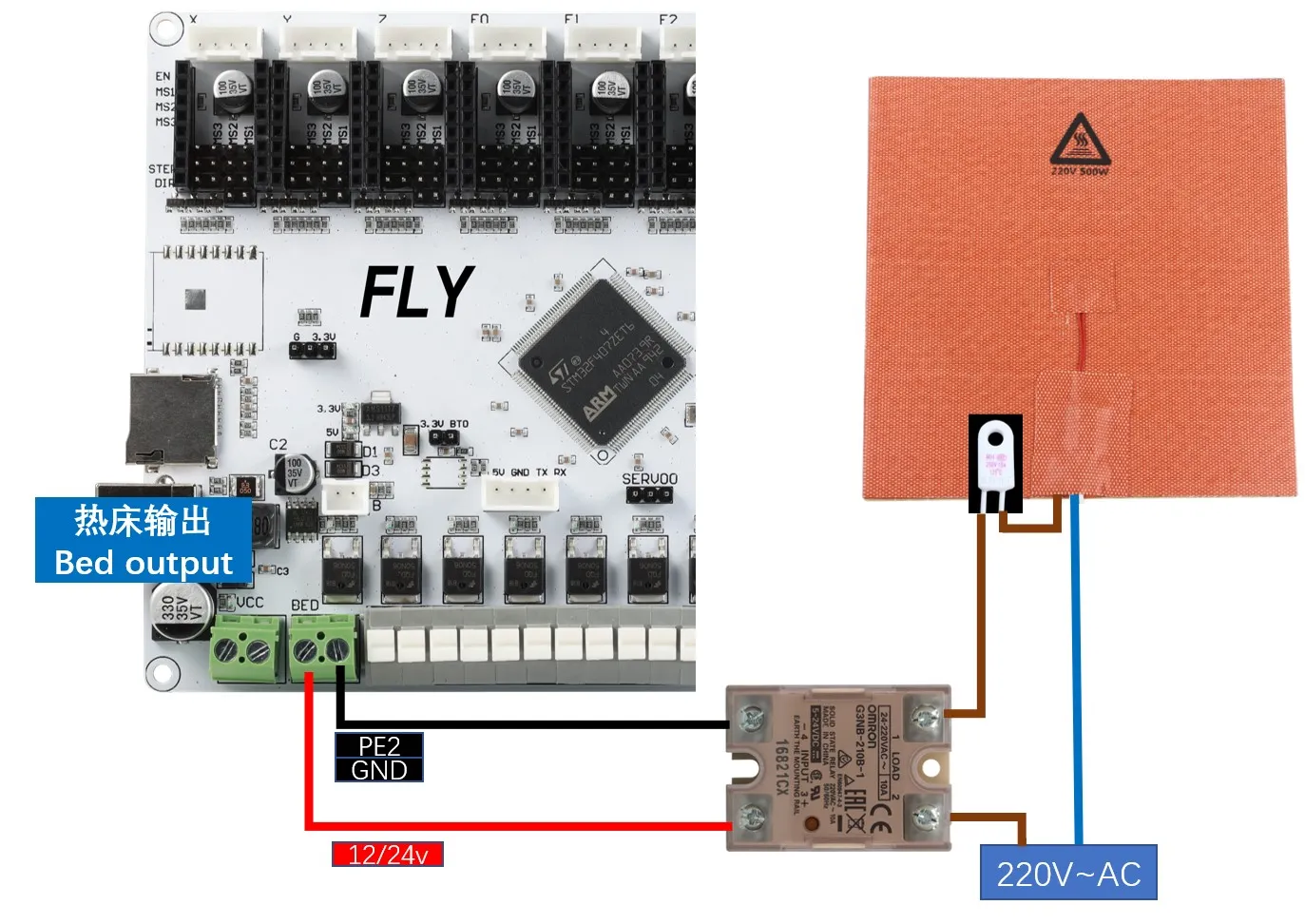
交流ホットベッド: ソリッドステートリレーの配線時には入力と出力を取り違えないように注意してください。
-
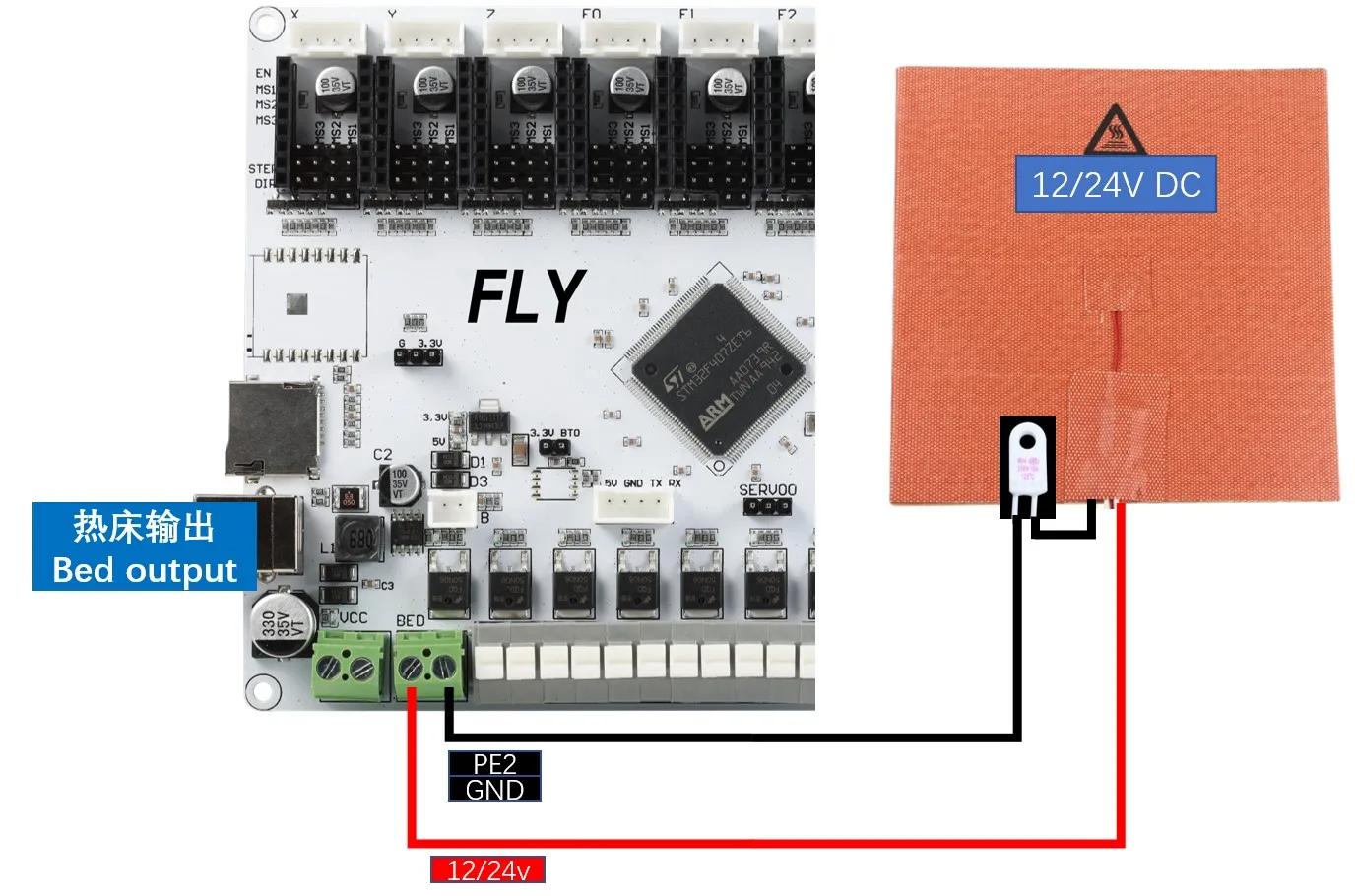
直流ホットベッド: ボード上のMOSで直流ホットベッドを使用する際は消費電力に注意してください。直流ホットベッドの最大電流は10Aを超えてはいけません。10Aを超える場合、ホットベッドに外付けMOSモジュールを使用することをお勧めします。さもなくばメインボードに不可逆な損傷を与える可能性があります。
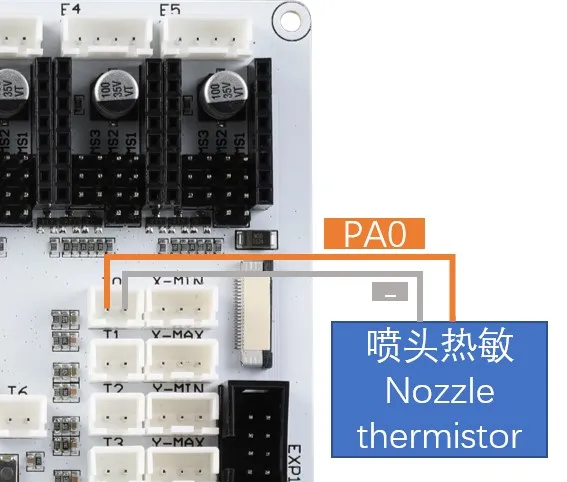
温度センサ配線
温度センサの種類紹介
-
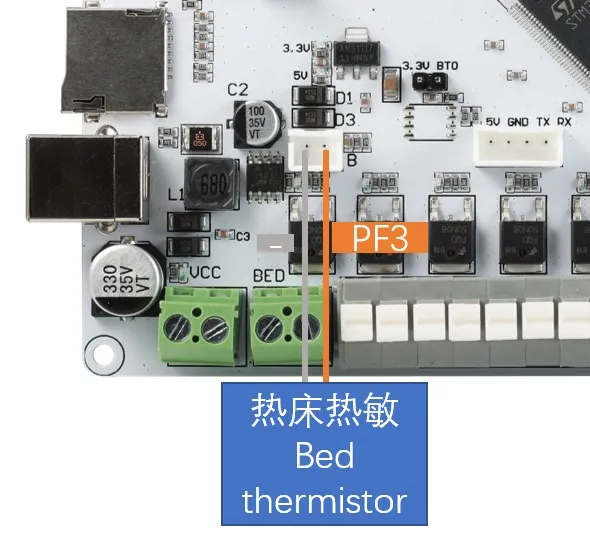
温度センサの配線方法は下図の通りです。温度センサの種類については購入先に確認してください。
-
FLYで購入した場合(下図参照)、sensor_typeをATC Semitec 104GT-2に設定してください。

-
一般的なNTC 100Kの場合(下図参照)、sensor_typeをGeneric 3950に設定してください。


メインボード温度センサ配線
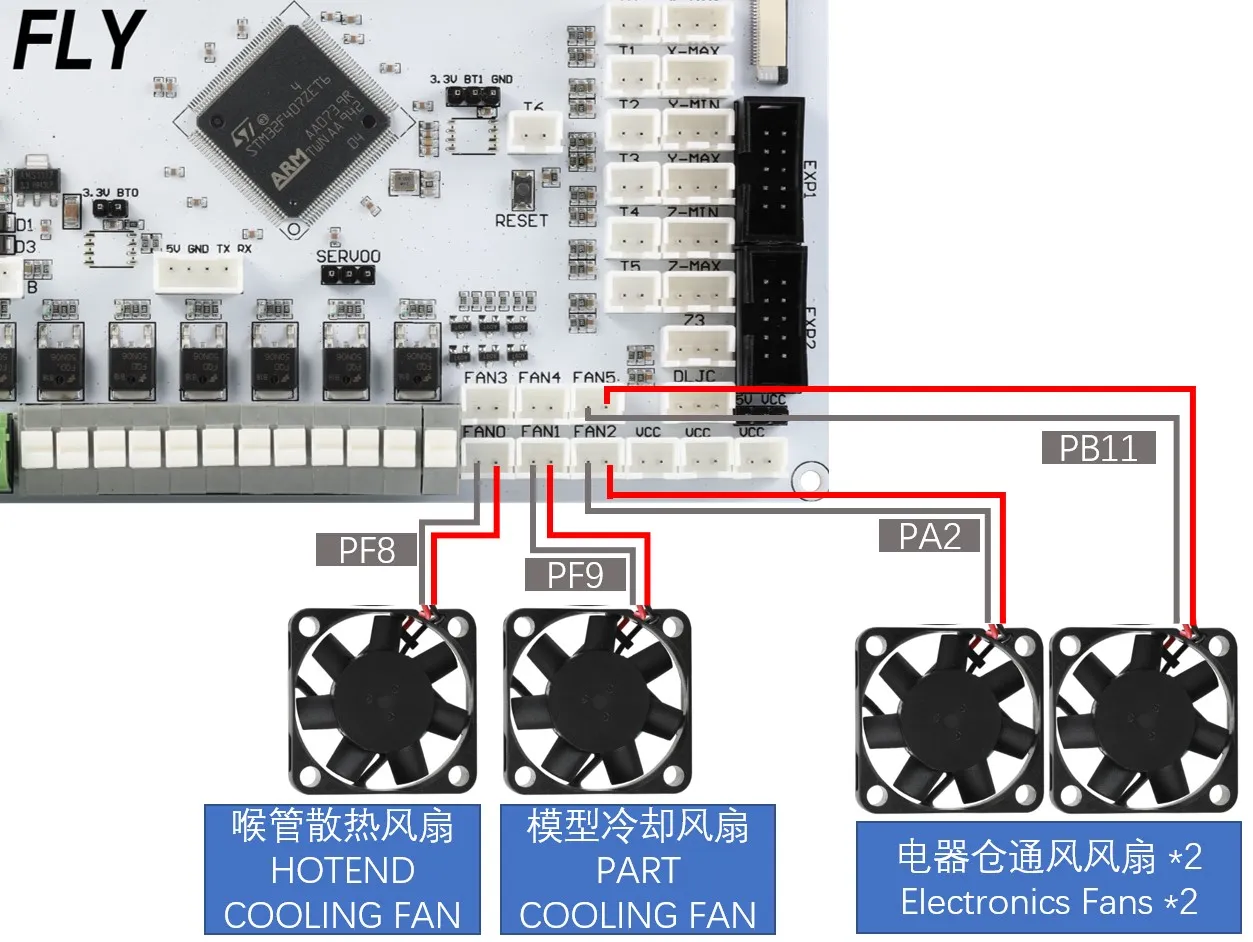
ファン配線
-
ファン配線
ヒント- MOSは取り付ける必要があります。
- ファン配線
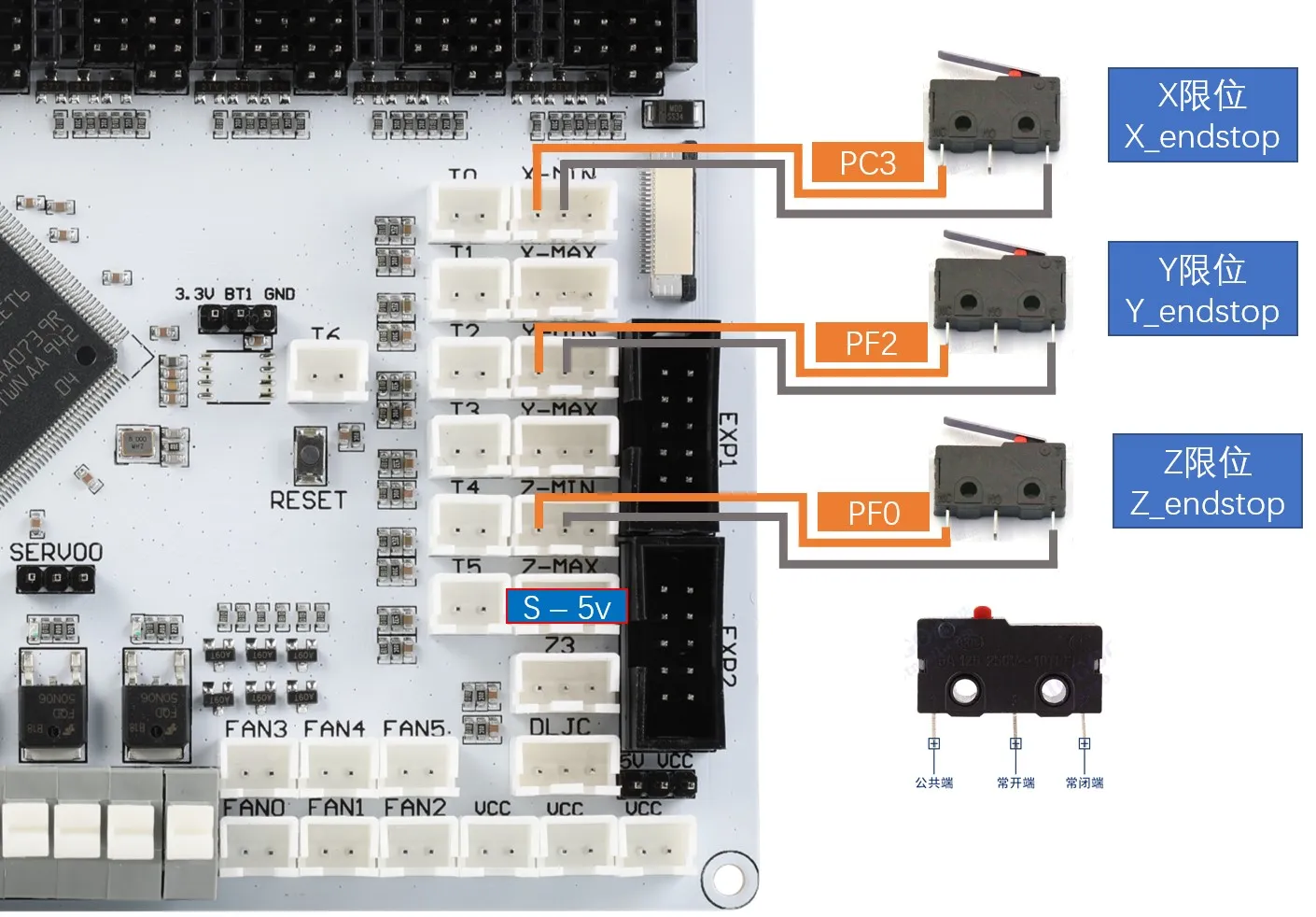
リミットスイッチ配線
-
リミットスイッチには常開接点(NO)と常閉接点(NC)の2種類があります。一般的な3Dプリンタでは**常閉接点(NC)**の使用をお勧めします。こうすることでリミットスイッチの配線に問題が発生した際にシステムが即座にエラーを報告し、衝突によるプリンタの損傷を防ぐことができます。
レベルセンサ配線
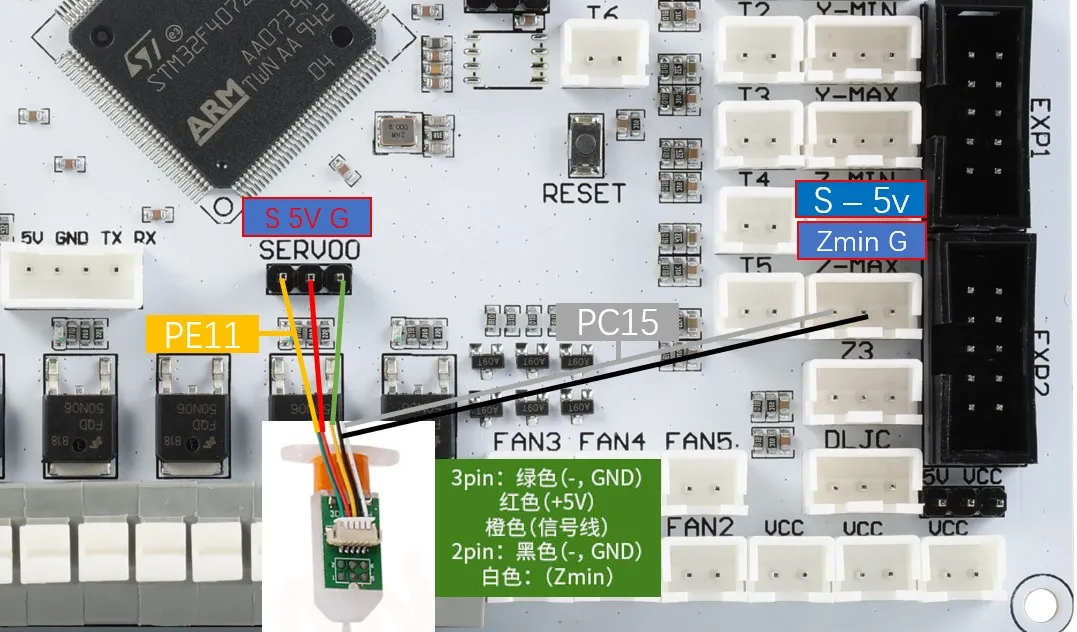
BL-Touch配線
-
BL-touchには全部で5本の配線があります。3本は第1グループで、センサの電源供給とプローブの伸縮を担当します。第2グループはGNDと信号線で、リミット信号を出力します。BL-touchの配線時には配線順序を慎重に確認してください。間違った配線はセンサやメインボードに永久的な損傷を与える可能性があります!!!配線方法は下図の通りです。
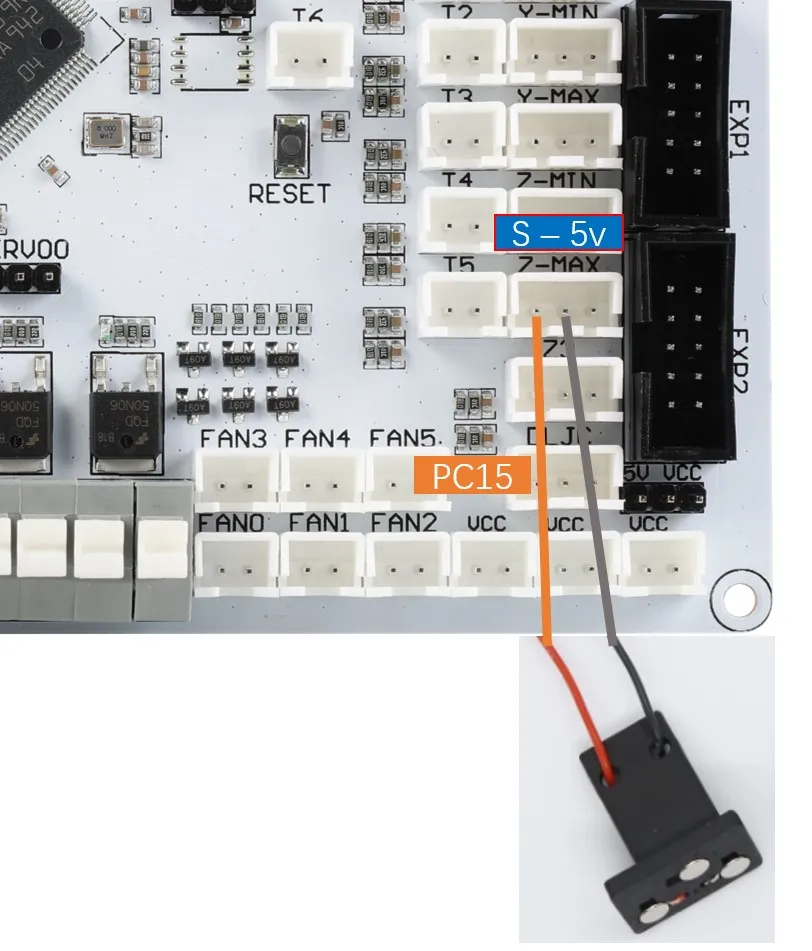
Klicky配線
-
Klickyはサードパーティ製のレベルセンサで、自宅で非常に低コストで製作でき、性能が安定しておりコストパフォーマンスが高いためお勧めです。配線方法は下図の通りです。
-
プロジェクトアドレス:jlas1/Klicky-Probe
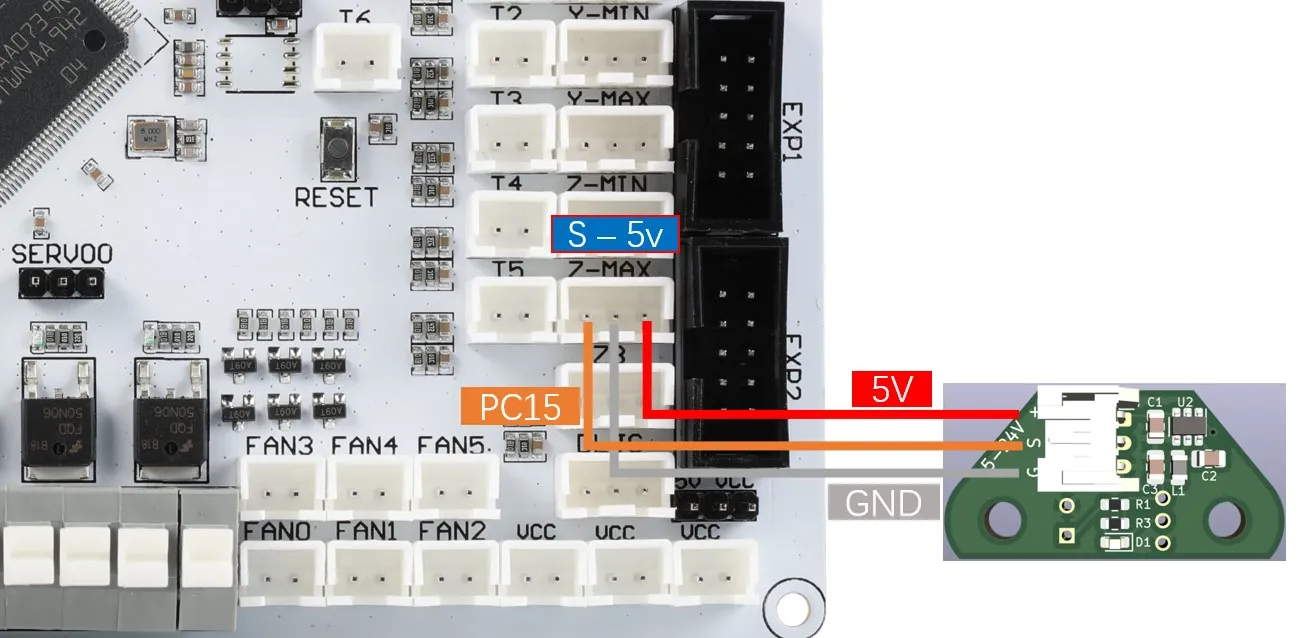
Voron Tap配線
-
TapはノズルベースのZプローブで、V2およびTridentプリンタの設計に適しています。ツールヘッド全体が移動して光スイッチをトリガーするため、通常のリミットスイッチよりも精度が高く、市販されているほぼすべてのプリントプラットフォームに使用できます。
手記Voron Tapには24Vの接続はお勧めしません。一部のバージョンで24Vを使用するとTapセンサが破損する可能性があり、これはFly製品の問題ではなくVoron Tapの設計上の欠陥によるものです。ご了承ください!!!
危ない注意:5VとGNDの接続を逆にしないでください。さもなくばTapセンサやメインボードを破損させる可能性があります!!!
上位機との接続
-
メインボードはType-Bインターフェースを介して上位機のUSBポートに接続できます。またはシリアルポート経由で上位機に接続することもできます。ここでは前者について説明します。