- Assurez-vous que l'ordinateur principal est connecté à Internet
- Avant la compilation du firmware, vous devez vous connecter à l'ordinateur principal via SSH par le réseau
- N'utilisez pas d'outils de terminal série pour vous connecter à l'ordinateur principal
Compilation du firmware Katapult
Démarrage de la compilation
- Vous devez utiliser une station supérieure avec le service
klipperinstallé Connexion via SSH par réseau - Assurez-vous que l'appareil est bien connecté à la station supérieure
- Attention : Veuillez utiliser une station supérieure ordinaire, comme un Raspberry Pi ou un FLY Pi. Si vous utilisez une station supérieure modifiée (par exemple, une clé WiFi, Redmi, etc.), ces stations présentent trop de problèmes et nous ne pouvons pas vous fournir de support technique
- Pour passer de l'utilisateur
ROOTà un utilisateur normal, vous pouvez entrer la commande ci-dessous - N'utilisez pas l'utilisateur
ROOT - L'utilisateur fly peut simplement entrer :
su fly, si vous n'êtes pas l'utilisateur fly, veuillez remplacer<Votre nom d'utilisateur sur la station supérieure>par votre nom d'utilisateur sur la station supérieure !
su <Votre nom d'utilisateur sur la station supérieure>
Explications sur les opérations de compilation et de configuration du firmware Katapult
Assurez-vous que votre méthode de saisie au clavier est en mode demi-largeur, c'est-à-dire en mode anglais
- La touche flèche vers le haut
↑, la touche flèche vers le bas↓sont utilisées pour déplacer le curseur verticalement pour sélectionner des éléments de menu - La touche Entrée
Enterou la barre d'espaceSpaceest utilisée pour cocher des cases ou entrer dans des sous-menus - La touche Échap
ESCest utilisée pour revenir au menu précédent - La touche
Qest utilisée pour quitter la page de configuration du firmware Katapult - La touche
Yest utilisée pour sauvegarder la configuration lors de la sortie de la page de configuration du firmware Katapult si une invite apparaît
Voici comment compiler le firmware :
-
Connectez-vous via SSH, puis entrez la commande suivante et appuyez sur Entrée :
cd ~/katapult && rm -rf ~/katapult/.config && rm -rf ~/katapult/out && make menuconfig -
Ici,
rm -rf ~/Katapult/.config && rm -rf ~/Katapult/outsupprime les données de compilation précédentes et le firmware, tandis quemake menuconfigcompile le firmware, et il devrait apparaître l'interface suivante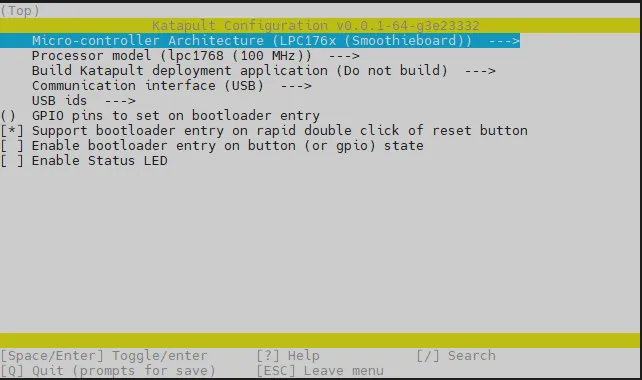
-
Sélectionnez
Micro-controller Architecture (LPC176x (Smoothieboard))puis appuyez sur Entrée -
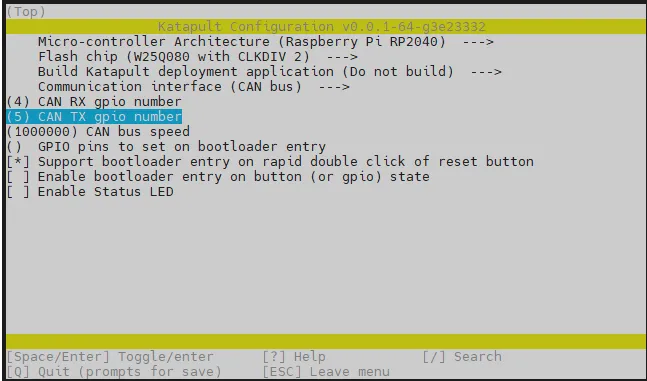
Entrez dans le menu, puis sélectionnez Raspberry Pi RP2040 et appuyez sur Entrée

-
Sélectionnez
Build Katapult deployment application (Do not build), choisissez : Do not build
-
Sélectionnez Communication interface, choisissez : CAN bus
-
Sélectionnez
(4) CAN RX gpio number, effacez4et entrez1 -
Sélectionnez
(5) CAN TX gpio number, effacez5et entrez0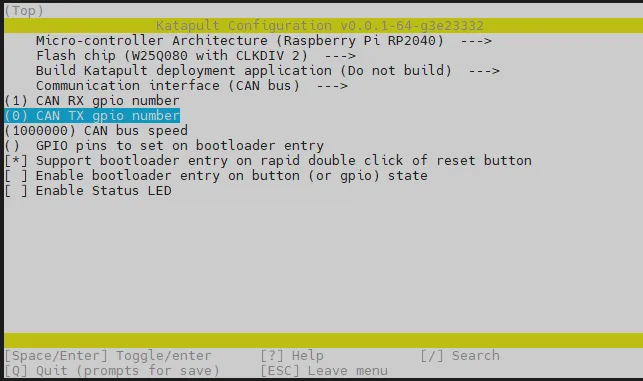
-
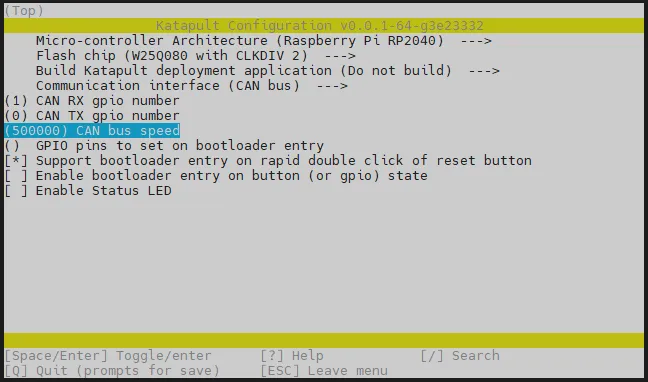
La vitesse du bus CAN est définie par défaut à 1000000, si vous voulez la modifier, mettez-la à
500000 -
C'est pour 1M
-
C'est pour 5k
-
Sélectionnez Enable Status LED puis appuyez sur Entrée, entrez : !gpio18
Entrez !gpio18 en mode anglais
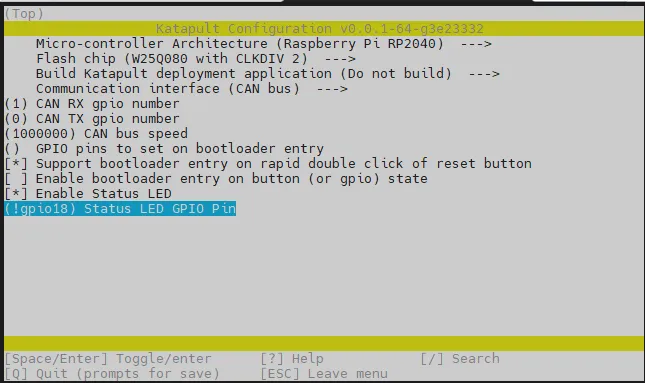
- Vérifiez soigneusement l'image ci-dessus pour vous assurer qu'elle correspond, puis passez à l'étape suivante
- Appuyez sur
Qpour afficher Save configuration, puis appuyez surY
- Vous devriez maintenant avoir sauvegardé la configuration et être sorti dans l'interface de ligne de commande
- Tapez
make -j4pour démarrer la compilation, cela prend un certain temps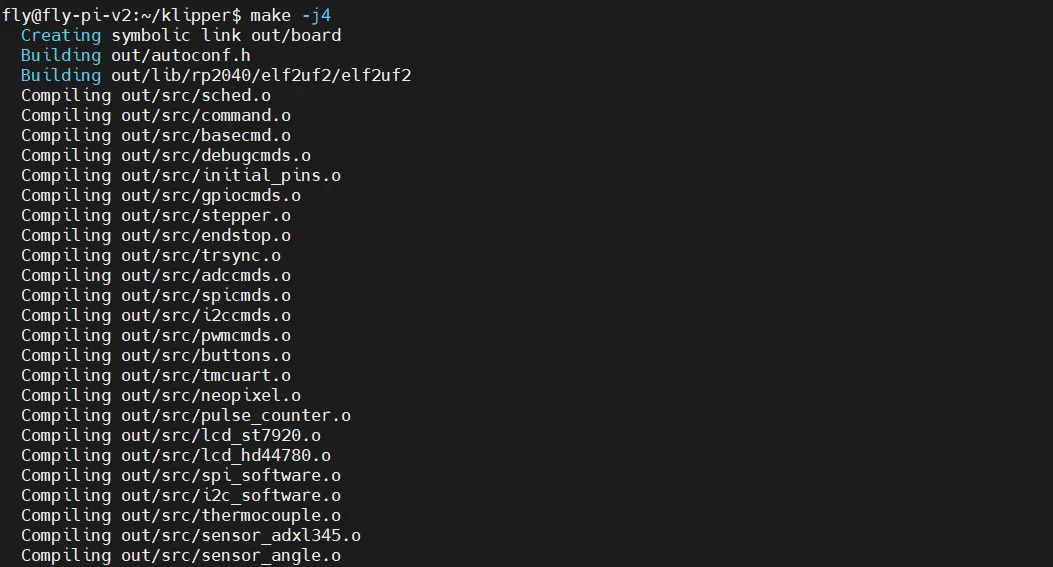
- Si la sortie finale contient le contenu suivant, alors la compilation a réussi
Linking out/katapult.elf
Creating bin file out/katapult.bin
Creating legacy binary out/canboot.bin
Building out/lib/rp2040/elf2uf2/elf2uf2
Creating uf2 file out/katapult.uf2
Creating legacy uf2 file out/canboot.uf2
Compiling out/src/deployer.o
Compiling out/src/generic/armcm_boot.o
Compiling out/src/generic/armcm_reset.o
Building out/deployer_ctr.o
Compiling out/katapult_payload.o
Preprocessing out/src/generic/armcm_deployer.ld
Linking out/deployer.elf
Creating hex file out/deployer.bin
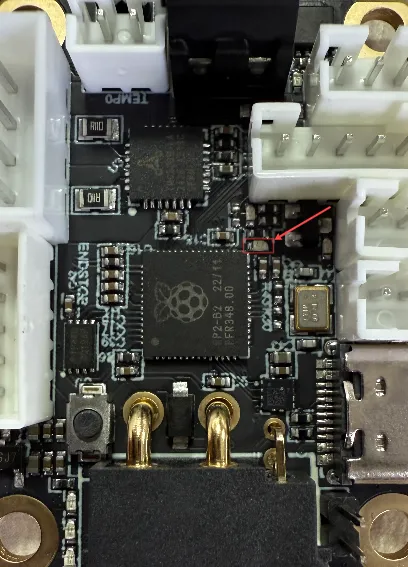
Entrée en mode de programmation
La flèche indique le bouton BOOT
- Dans l'état où la carte mère est complètement déconnectée de l'alimentation, maintenez le bouton
BOOTenfoncé tout en connectant un câble de transmission de données entre la carte mère et votre appareil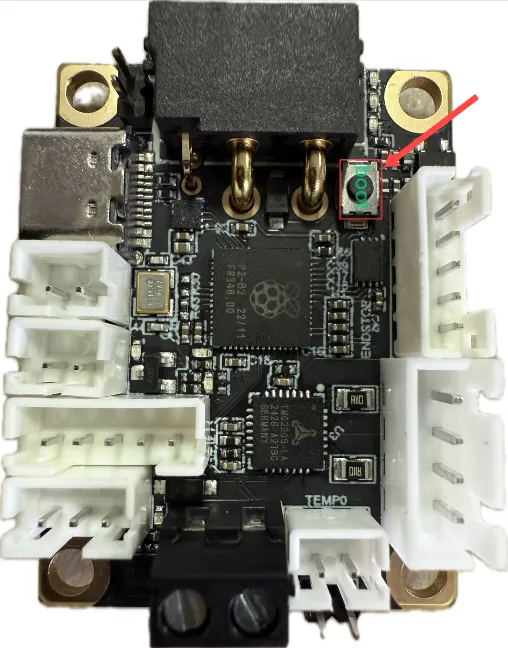
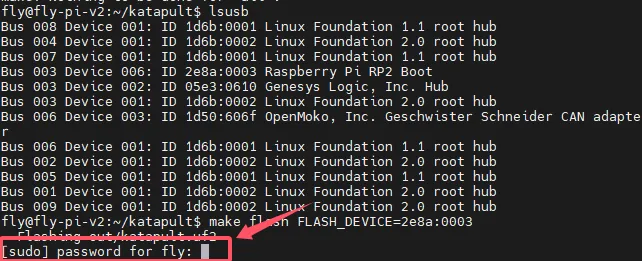
- Ensuite, tapez
lsusb
lsusb
- Si l'image suivante apparaît, cela signifie que vous êtes en mode de démarrage

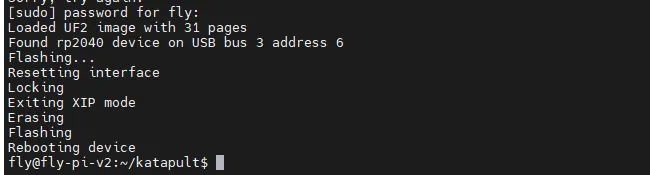
- Tapez la commande suivante pour écrire le firmware, puis appuyez sur Entrée
make flash FLASH_DEVICE=2e8a:0003
Le texte mellow n'apparaîtra pas lors de l'entrée
-
Si l'image suivante apparaît, tapez
mellowet appuyez directement sur Entrée -
Si l'image suivante apparaît, félicitations, vous avez réussi à écrire le firmware
Vérification de l'amorçage du firmware
- Si le firmware démarre normalement, la LED va clignoter
- Tapez la commande suivante pour rechercher l'ID CAN, puis appuyez sur Entrée
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
- Si la commande ci-dessus ne trouve pas l'ID, essayez la commande suivante
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can1
Après l'exécution, l'image suivante apparaît avec l'ID, qui est une valeur de référence et ne peut pas être utilisée
