提示
- 请确保上位机可以正常联网
- 固件编译前需要使用SSH通过网络登录上位机
- 请不要使用串口工具登录上位机
编译Katapult固件
开始编译
- 需要使用安装好
klipper服务的上位机 通过网络连接SSH - 并且将设备与上位机连接好
- 注意:请使用普通的上位机,比如树莓派 FLY派等。如果是魔改上位机(例如WiFi棒子、红米等),这类上位机因问题太多,无法为您提供技术支持
注意
- 将
ROOT用户切换到普通用户可以输入下方命令 - 请不要使用
ROOT用户 - fly用户可直接输入:
su fly,非fly用户请将<您的上位机用户名>,替换为您上位机的用户名! flyos-fast系统默认用户名为root,密码为mellow
su <您的上位机用户名>
Katapult固件编译和配置页面操作说明
提示
请确保键盘输入法为半角模式,即英文模式
- 键盘上键
↑,下键↓,用于上下移动光标来选中菜单项 - 确认键
Enter或 空格键Space,用于勾选菜单或进入子菜单 - 退出键
ESC,用于返回上一级菜单 Q键,用于退出Katapult固件配置页面Y键,在退出Katapult固件配置页面时,如果有提示,则点击Y键保存配置文
下面介绍如何编译固件:
-
连接到SSH后输入下面的命令并回车:
cd ~/katapult && rm -rf ~/katapult/.config && rm -rf ~/katapult/out && make menuconfig -
其中
rm -rf ~/Katapult/.config && rm -rf ~/Katapult/out是删除之前编译数据与固件make menuconfig是编译固件,执行后应该出现下方界面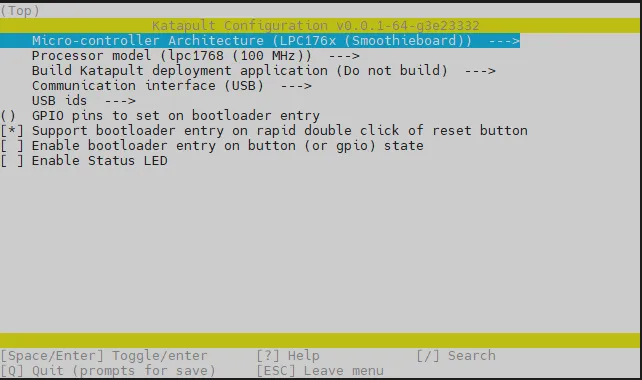
-
选择
Micro-controller Architecture (LPC176x (Smoothieboard))并且回车 -
进入菜单然后选择Raspberry Pi RP2040回车

-
选择
Build Katapult deployment application (Do not build),选择:Do not build
-
选择Communication interface,选择:CAN bus
-
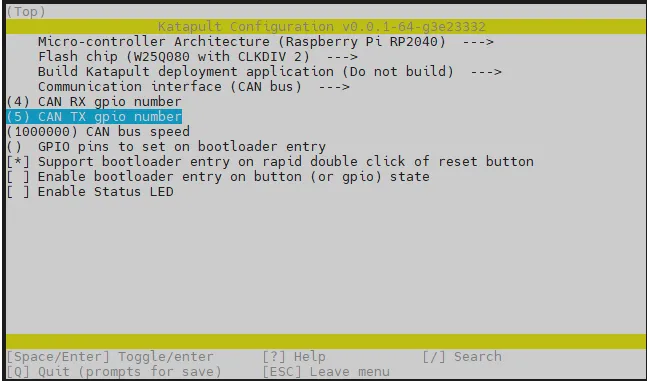
选择
(4) CAN RX gpio number,删除4输入1 -
选择
(5) CAN TX gpio number,删除5输入0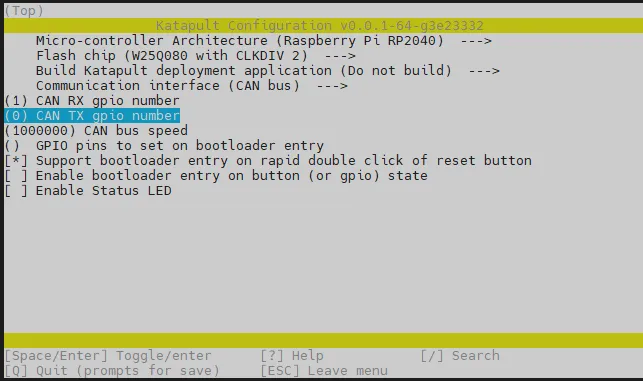
-
CAN bus speed默认是1000000,如使用修改为500000 -
这是1M的
-
这是5k的
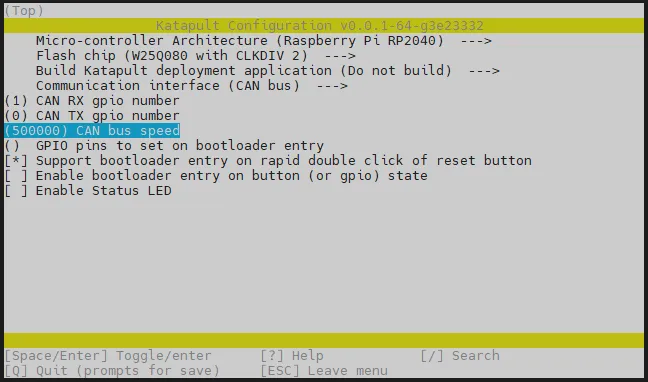
-
选择Enable Status LED回车,选择
Status LED GPIO Pin (NEW)输入:!gpio18
注意
请在英文输入法状态下输入!gpio18
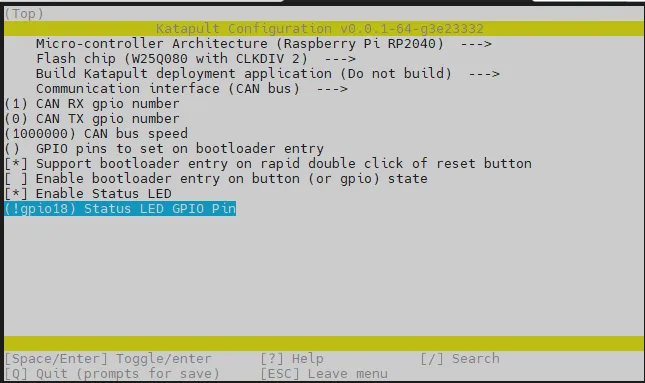
- 请对照上图核对,确保与上图一致,再进进行下一步
- 按
Q键,出现 Save configuration,这时再按Y键
- 现在应该保存了配置并且退出到了命令行界面
- 输入
make -j4开始编译,时间有点长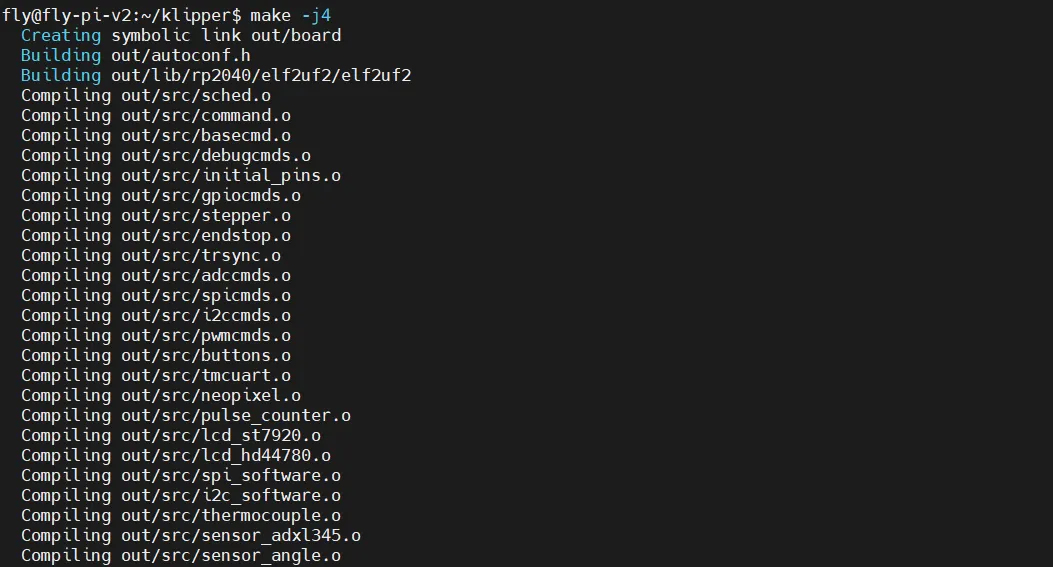
- 最后输出下面的内容则编译成功
Linking out/katapult.elf
Creating bin file out/katapult.bin
Creating legacy binary out/canboot.bin
Building out/lib/rp2040/elf2uf2/elf2uf2
Creating uf2 file out/katapult.uf2
Creating legacy uf2 file out/canboot.uf2
Compiling out/src/deployer.o
Compiling out/src/generic/armcm_boot.o
Compiling out/src/generic/armcm_reset.o
Building out/deployer_ctr.o
Compiling out/katapult_payload.o
Preprocessing out/src/generic/armcm_deployer.ld
Linking out/deployer.elf
Creating hex file out/deployer.bin
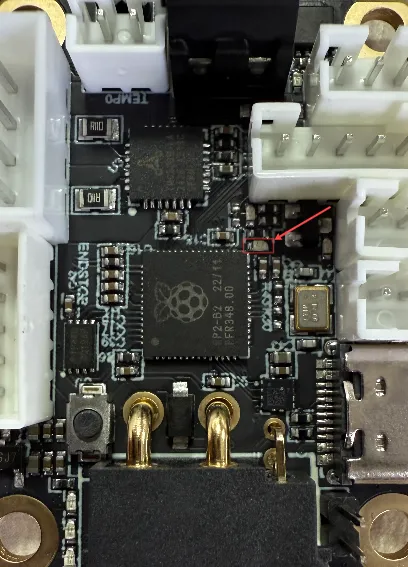
进入烧录模式
提示
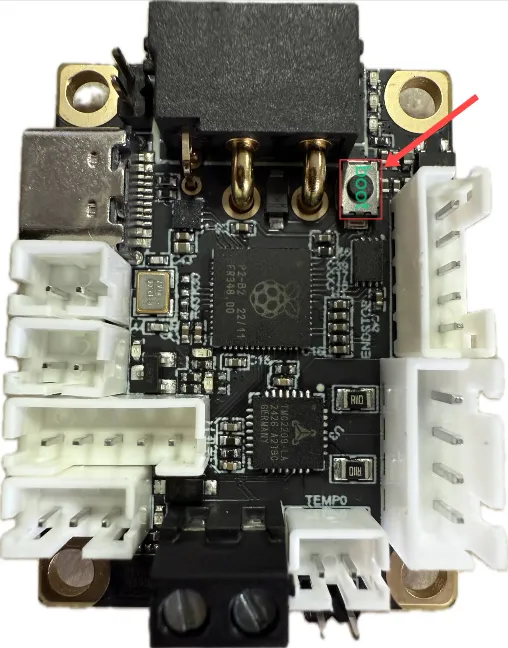
箭头所指为BOOT按键
- 主板完全断电情况下,按着BOOT按键然后将带有数据传输的数据线一头接主板一头接你设备
- 然后输入
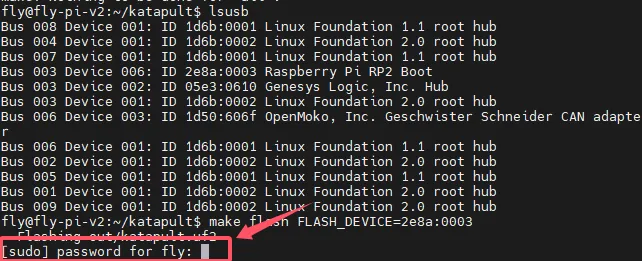
lsusb
lsusb
- 出现下面图片里面的代表已经进入boot模式
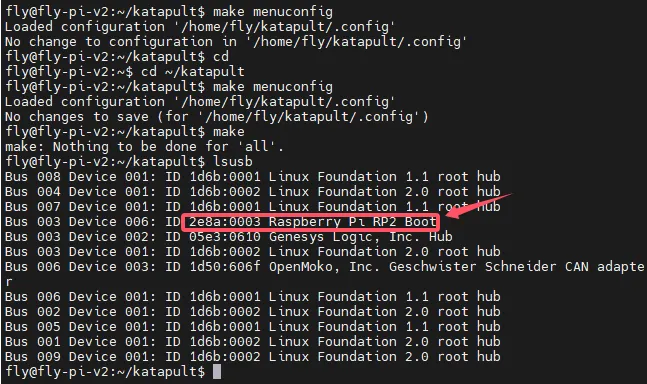
- 输入下面的命令进行刷写固件然后回车
make flash FLASH_DEVICE=2e8a:0003
提示
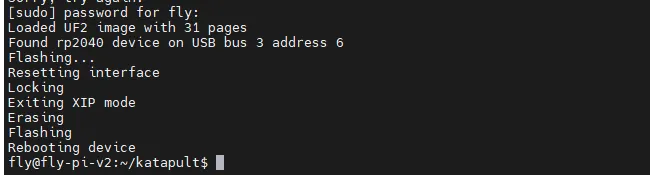
输入mellow是不会显示的
-
如出现图片里面的情况输入
mellow输入完成了直接回车 -
出现图片里面的提示那么
恭喜您刷写成功
确认固件是否启动
- 如果固件正常启动LED会闪烁起来
- 搜索can id命令,输入后回车
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
- 如上面命令没有搜索出来id那么可以尝试下面命令
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can1
输入后会出来下面图片里的id,这里的id是参考值,不可使用

Loading...